

"He who has Health has Hope, he who has hope has everything" -anonymous.
INTRODUCTION :-
In addition to enhancing human performance, robotic systems provides the unique ability to perform surgery in remote locations.
Remote surgical operations require both rapid and accurate transmission of information. Factors that influence significantly the rapidity and accuracy of this information are the time required to convert video images and gestures into electronic signals, and the bandwidth and time lag of existing telecommunication lines.
METHOD :- (Explained as a passive text)
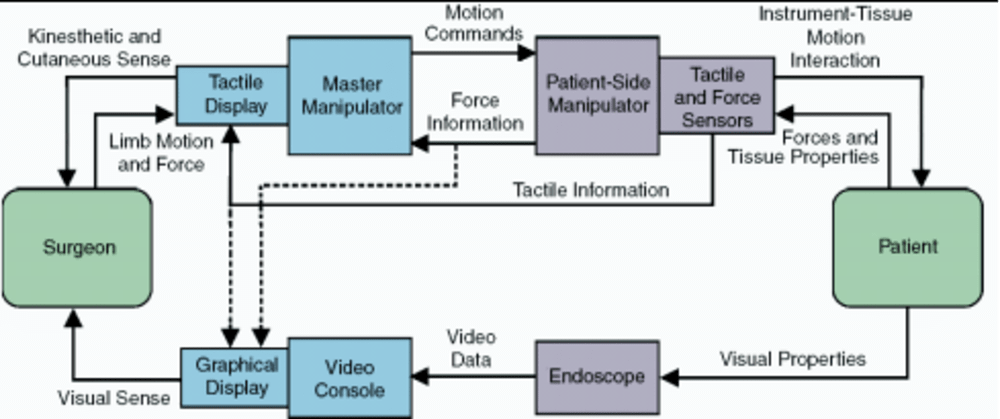
The Main System consisted of two physically separated subsystems named “surgeon-side” and “patient-side”. The surgeon’s subsystem (based in X city) had a console that took surgeon’s input; the patient’s subsystem (based in Y city) included two robotic arms that translate the input into actual instrument manipulation, and an additional robotic arm to control the endoscopic camera. A variety of surgical instruments were connected to the robotic arms, so that the surgeon could activate graspers and so forth manipulate the handles at the remote console. Two computers connected by the high-speed communication channels linked the two subsystems. Camera movements were directed from the computer in X city according to operating surgeon’s instructions.
Network Connections and Monitoring
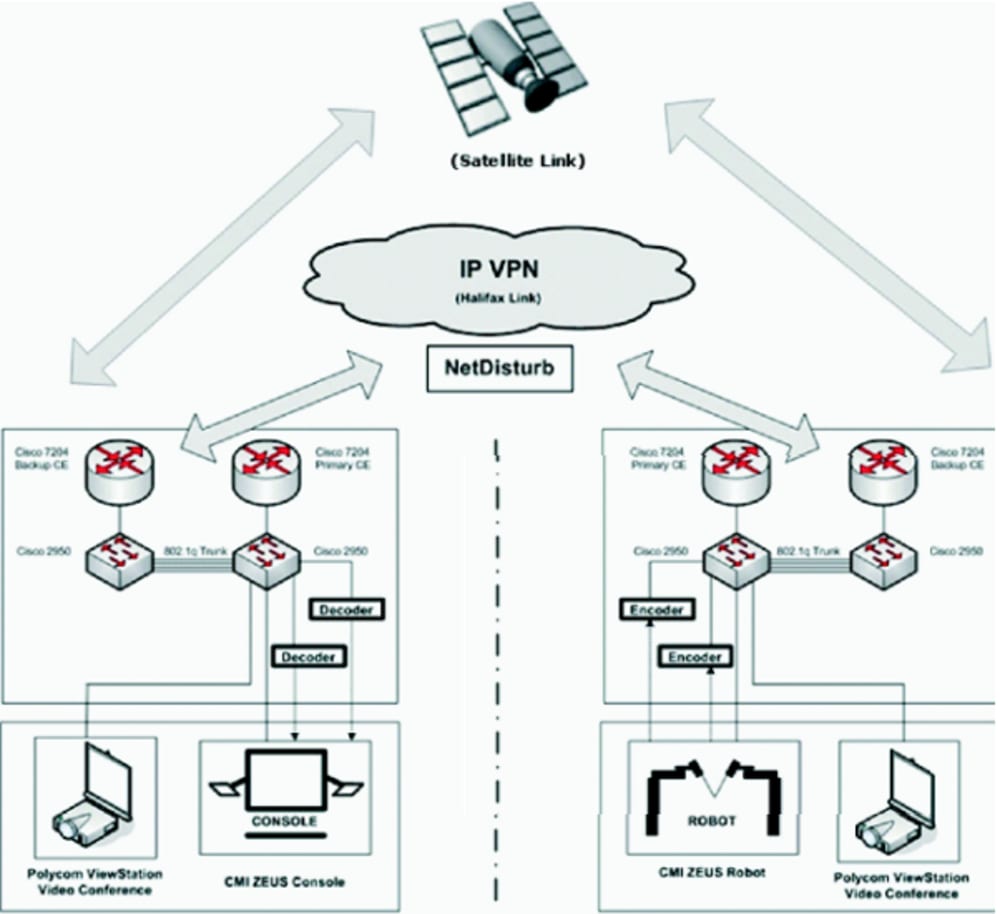
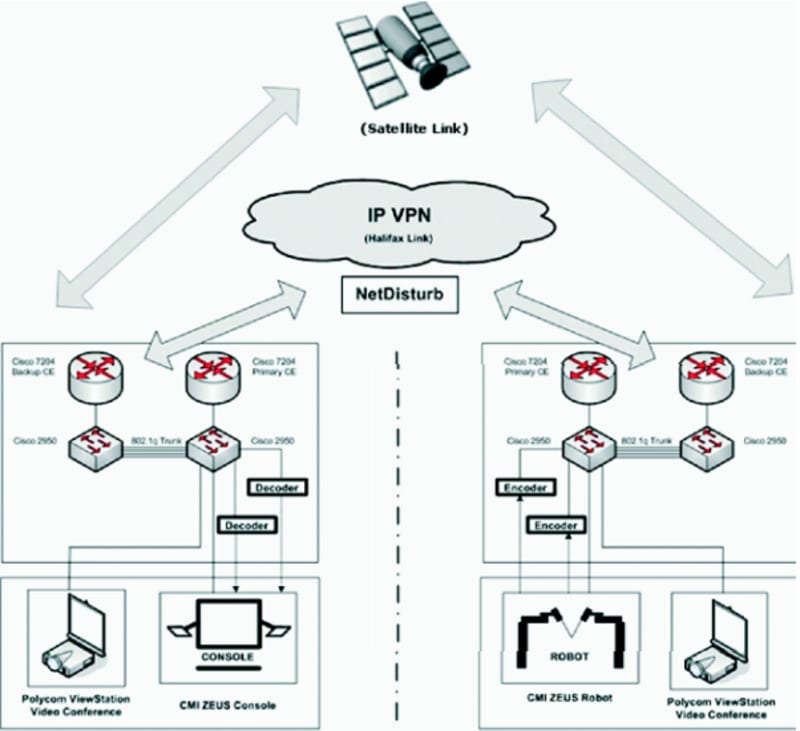
Connections between X and Y cities were established through asynchronous transfer mode (ATM) technology . ATM network nodes are interconnected through a high-speed terrestrial fiberoptic network that transports data through virtual connections dedicated per customer. The ATM network provides a high quality of service for data transport. For instance, the probability of having no network outage is 99.99% (so-called network availability rate); the ATM network provides a low transport delay and low packet loss ratio.
A virtual pathway using ATM technology was set up between X city and the operating room within Y city. A bandwidth of 10 Mb/s has been reserved through network interconnecting applications at both sites using a network termination unit (NTU), which provides a multiservice path to different applications.
To monitor/measure its own level of quality, the sender inserted operating and maintenance (OAM) packets within user data flow, which were extracted and analyzed by the remote receiver. Analyzing these packets and comparing the number of user packets initially sent to those actually received, we measured the lost packets.
Robot motion data had a high priority and a rate guarantee of 512 Kb/s within the 10-Mb/s virtualpath. Video packets were sent with a minimum guaranteed rate of 7 Mb/s, with the possibility to use more bandwidth if available within the 10-Mb/s virtual path. Plugged a video conferencing system. Data coming from these two applications merged, and they received a guaranteed minimum rate of around 3 Mb/s.
The two sites were connected through videoconference systems at both sites.
CONCLUSIONS
Remote robot-assisted telesurgery is feasible using a designated ATM telecommunication line. The possibility of performing complex manipulations from remote locations allows an expert surgeon to teach the performance of an advanced or new technique by real-time intervention and actually eliminates geographic constraints for obtaining high surgical expertise where required.
Like this entry?
-
About the Entrant
- Name:Karanvir Singh Chhabra
- Type of entry:individual
- Software used for this entry:Other
- Patent status:none