




A number of companies are working on propulsive atmospheric return in attempt to develop reusable Vertical Takeoff Vertical Landing space vehicles. They all use at terminal descent the same controls –vectored trust, usually by a gimbaled engine used at ascent. Despite extensive testing, reliable pinpoint landing has not been demonstrated yet.
The core problem is controllability of propulsive descent at high deceleration rate of a booster optimized for space launch. Usually, it is a slender cylindrical body with gimbaled rocket engines on aft. Flying backward nearly empty rocket has significant different aerodynamic and mass properties from those during a space launch. The single-ended thrust control that works well on ascent is hard yet impossible to achieve reliable controllability at terminal landing phase.
A decisive improvement of controllability may be achieved by making the altitude controls differential instead of single-ended. Proposed solution is based on complementary reaction control system working synchronously with vectored thrust. The general idea is shown on Figure 1.
Complementary to main engine vectored trust control
A set of thruster are placed on opposite side of main engine to apply maximum control moments. Proposed configuration needs only minimal modifications and keeps the vehicle general arrangement.
The typical VTVL rocket is equipped with aerodynamic controls (fins) guiding it during the coast phase. In proposed They may provide complementary forces during the propulsive deceleration before landing until the airspeed is upon certain level. The reactive controls will graduate take the role aerodynamic controls after their efficiency diminishes.
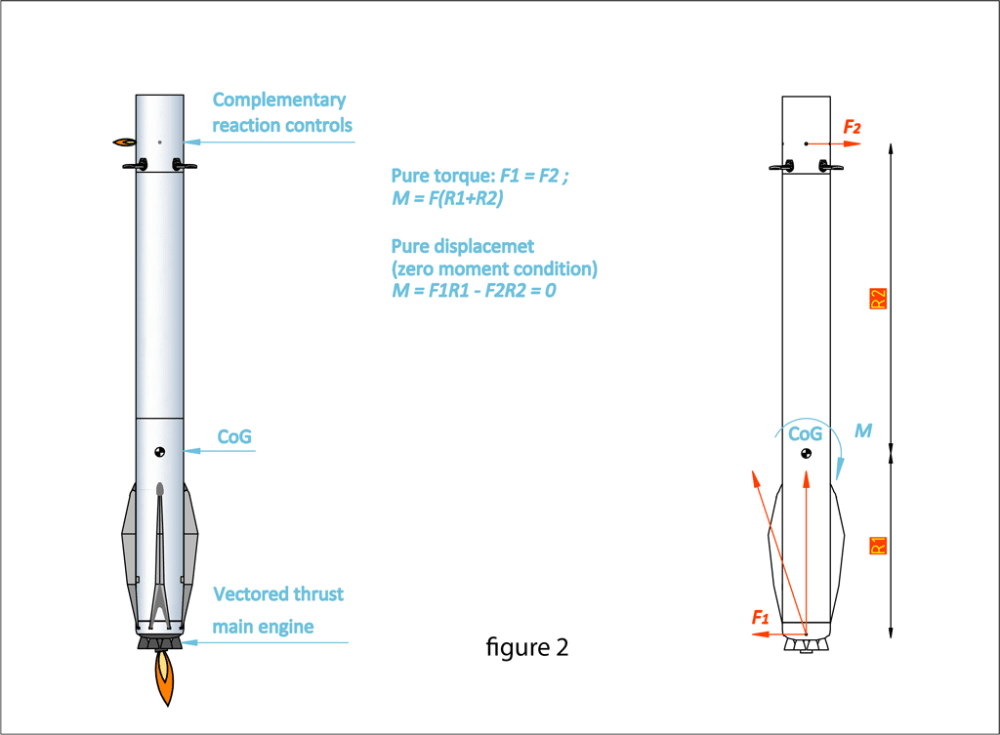
Essential feature of proposed design is the way reaction controls on the top from one side and the vectored thrust on the other side are coordinated. When pure moment has to applied the force inserted by reaction system on top will produce force equal to normal component force produced by vectored thrust. Thus, resulting moment will be M = F(R1+R2), [ref Figure 2]. Pure translation settings may be derived from zero moment condition M = F1R1 – F2R2 = 0 [ref Figure2]. Generally, the normal (lateral) force and rotational moment may be applied simultaneously but independently from each other and from the current angular coordinates of the vehicle.
The attitude and divert movements control channels decoupling has a number of improvements in controllability. Reaction time is reduced dramatically allowing high deceleration rates that are optimal for propellant consumption. The vehicle will remains stable under harsh weather related disturbances. The 6DoF (six degree of freedom) control make possible variety of flight paths and guidance algorithms enabling further optimization of the system. From theoretical point of view, proposed system removed unreachable states. Generally, it makes the control system more robust.
Main features:
• Direct 6 Degree of Freedom robust attitude and divert control
• Fast reaction due the decoupling of the attitude and divert control channels
• ‘Coordinated turn’ without sideslip
• Immunity against large weather related aerodynamic disturbances
• Integration with aerodynamic controls
Proposed system properties have been verified by simulation model.
Like this entry?
-
About the Entrant
- Name:Valentin Stavrev
- Type of entry:individual
- Software used for this entry:MapleSim
- Patent status:pending