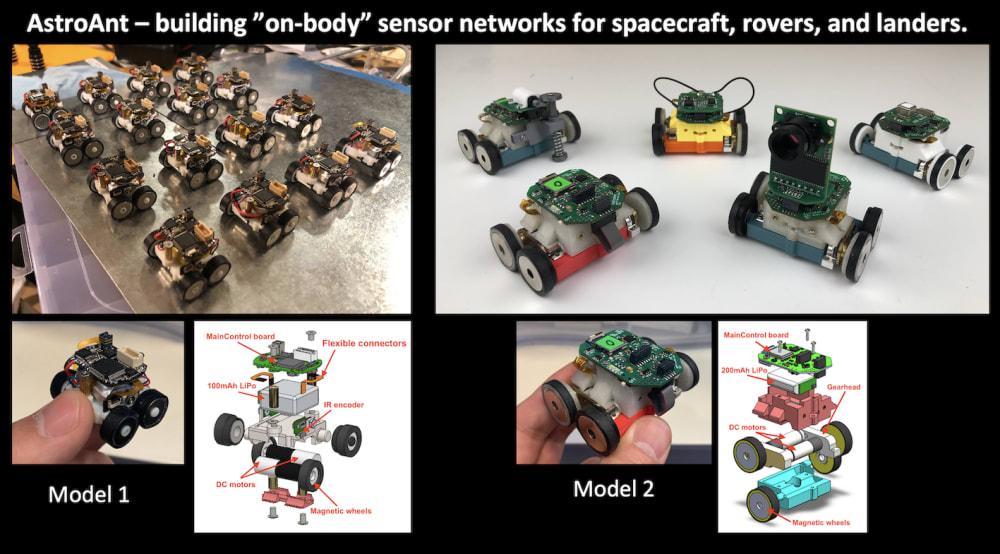
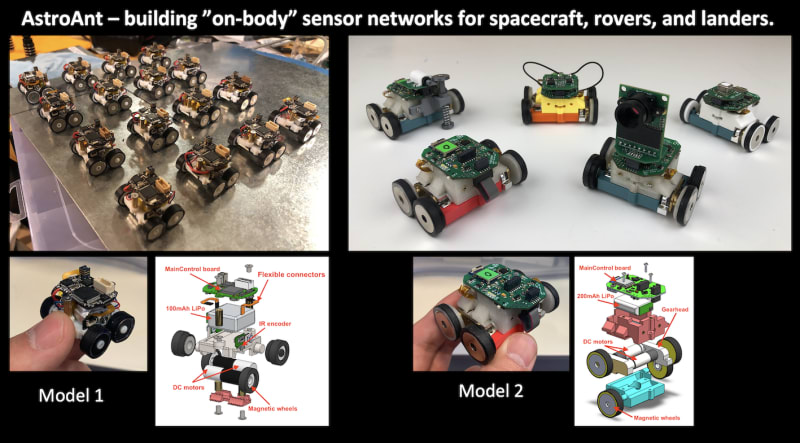





Future in-space operations — across LEO (Low Earth Orbit), lunar missions, and out to Mars — will heavily leverage robotics and autonomy to improve systems performance, reduce risk to human crews, and contribute to novel mission capabilities. Robots have long been used for remote operations, to support space missions. Expanding beyond large, cost-intensive robotic platforms, we present a novel approach for spacecraft environment monitoring, both internal and external, with small, low-cost, and low-resource investment swarm robots. By using smaller, easily replaceable, autonomous robots, mission ConOps can explore a wider range of diagnostic and servicing functionality with faster task completion. With a primary focus on next-generation technology development for spacecraft, rovers, and landers, we present a suite of multifunctional, autonomous, wheeled, robotic swarm units that can traverse a wide range of surfaces, sense and interact with their environment, and cover extensive territory. Here, we present the "AstroAnts," which are small robots for inspection and diagnostic tasks on external spacecraft surfaces, both in orbit and on planetary surfaces. Equipped with magnetic wheels, the robots can move on any ferromagnetic surface and flexible materials, such as Beta cloth or Multi-Layer Insulation that are widely used for lots of spacecraft, in microgravity or zero-gravity environments. Each robot features a modular design with varying sensor payloads that can be tailored based on custom mission requirements. Many AstroAnt robots can form an “On-body” sensor network for a spacecraft. By doing inspection sensing from the external surface, the data collected from the robots can be used to monitor the real-time performance of the host mothership.
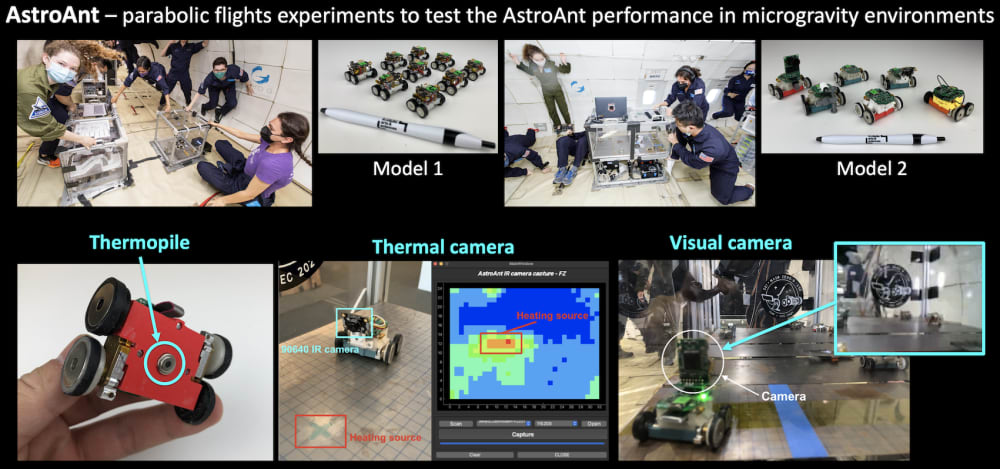
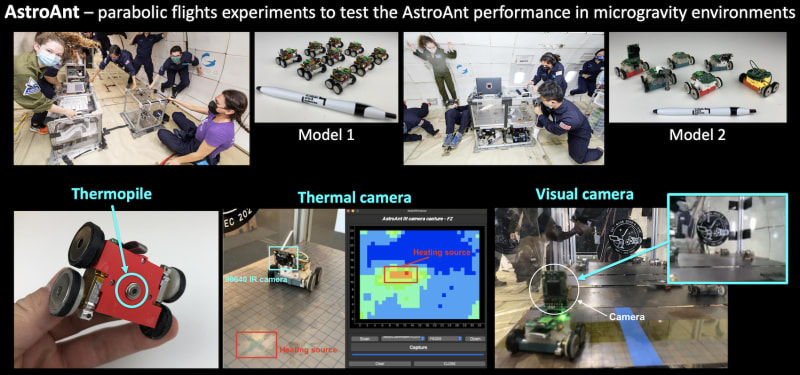
We have designed two models of robots for mobility and sensing capability tests in microgravity environments. The size of model 1 is 3.2 cm × 2.5 cm × 2.3 cm and of model 2 is 5.8 cm × 4.3 cm × 3.0 cm. Both models were successfully tested in zero, Lunar, and Martian gravity environments across four parabolic flights through the NASA "Tech Flights" program.
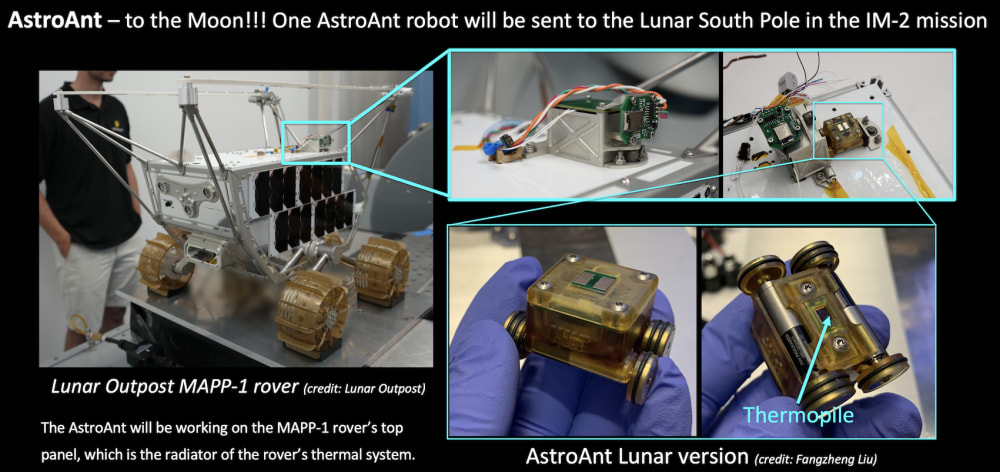
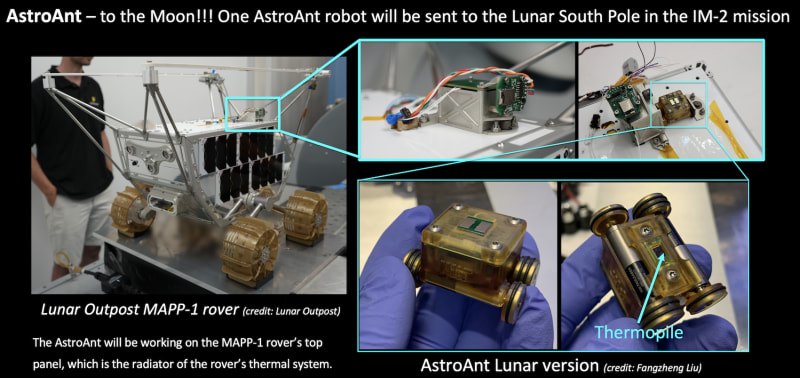
Based on the success of the NASA flight campaign, a further modified AstroAnt robot has been developed and will be deployed to the Lunar South Pole in the Intuitive Machines IM-2 mission in 2024. The AstroAnt robot will be carried by the MAPP-1 rover developed by the Lunar Outpost. This AstroAnt robot will be working on the MAPP-1 rover’s top panel, which is the radiator of the rover’s thermal system. With a thermopile equipped, the AstroAnt robot will move around and do contactless temperature measurements from different positions on the top panel. The data collected will help with monitoring the performance of the rover’s thermal system. The Lunar version of AstroAnt is 2.6 cm × 3.1 cm × 2.2 cm and only weighs 28g.
This will be the first-of-the-kind payload that we deploy to the Moon, and through this Lunar mission, we will show the potential to use a low-cost, easily deployed robot to facilitate future Lunar and deep space explorations.
Selected public media reports:
https://www.forbes.com/sites/ariannajohnson/2022/11/09/mit-will-return-to-the-moon-for-the-first-time-since-apollo-thanks-to-this-space-startup/?sh=45edf5d86d72
https://www.astronomy.com/space-exploration/the-im-2-moon-mission-will-carry-a-blend-of-science-and-art/
The AstroAnt flight hardware has already been delivered.
Video
-
Awards
-
 2024 Robotics & Automation Category Winner
2024 Robotics & Automation Category Winner -
 2024 Top 100 Entries
2024 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Fangzheng Liu
- Type of entry:teamTeam members:
- Fangzheng Liu
- Nathan Perry
- Tobias Roeddiger
- Sean Auffinger
- Joseph Paradiso
- Ariel Ekblaw
- Patent status:none