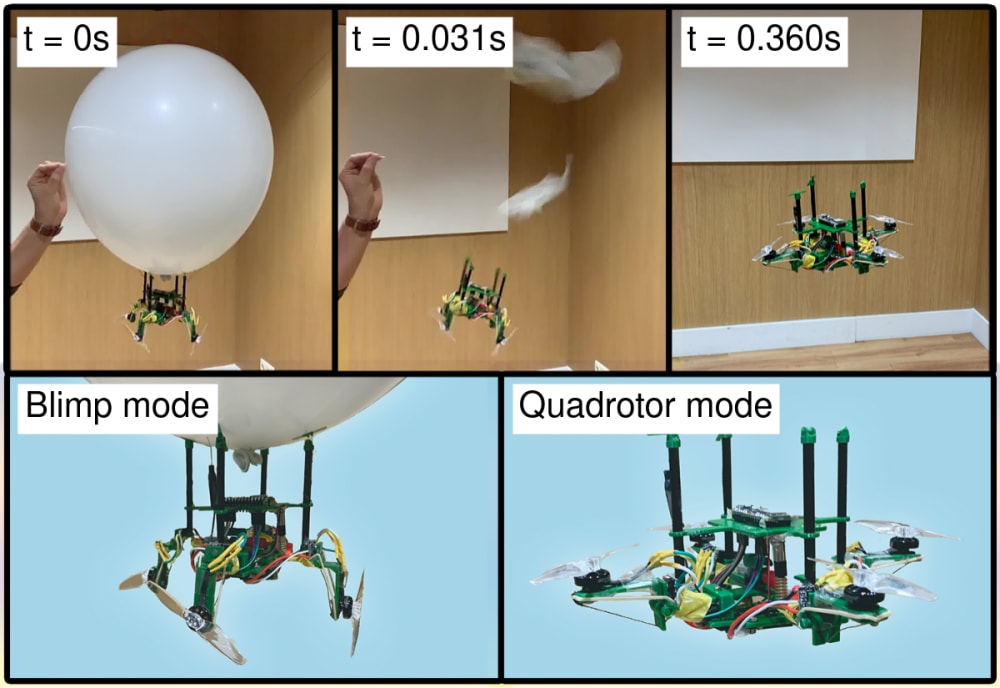
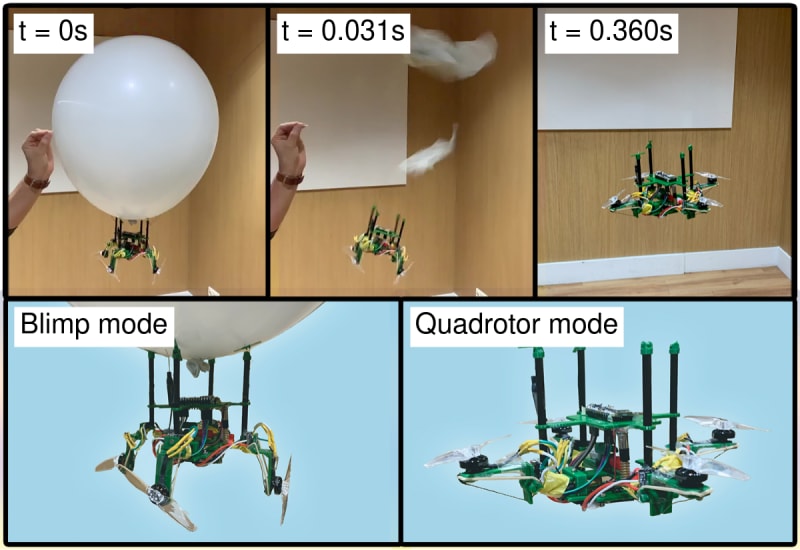




The increasing popularity of helium-assisted blimps for extended monitoring or data collection applications is hindered by a critical limitation -- single-point failure when the balloon malfunctions or bursts. We introduce Janus, a hybrid blimp-drone platform equipped with integrated balloon failure detection and recovery capability to address this. Janus employs a triggered mechanism that transitions the platform from a blimp to a quad-rotor drone.
Janus utilizes four rotors attached to a helium-inflated balloon for increased maneuverability, agility, and extended operational air time compared to regular multi-rotor drones. Unlike a regular quadrotor, when in blimp mode, the motors' axes lay in the horizontal plane, i.e., propeller blades are vertical to the ground, allowing for complete planar motion; additionally, the drone can fly vertically, making it omnidirectional.
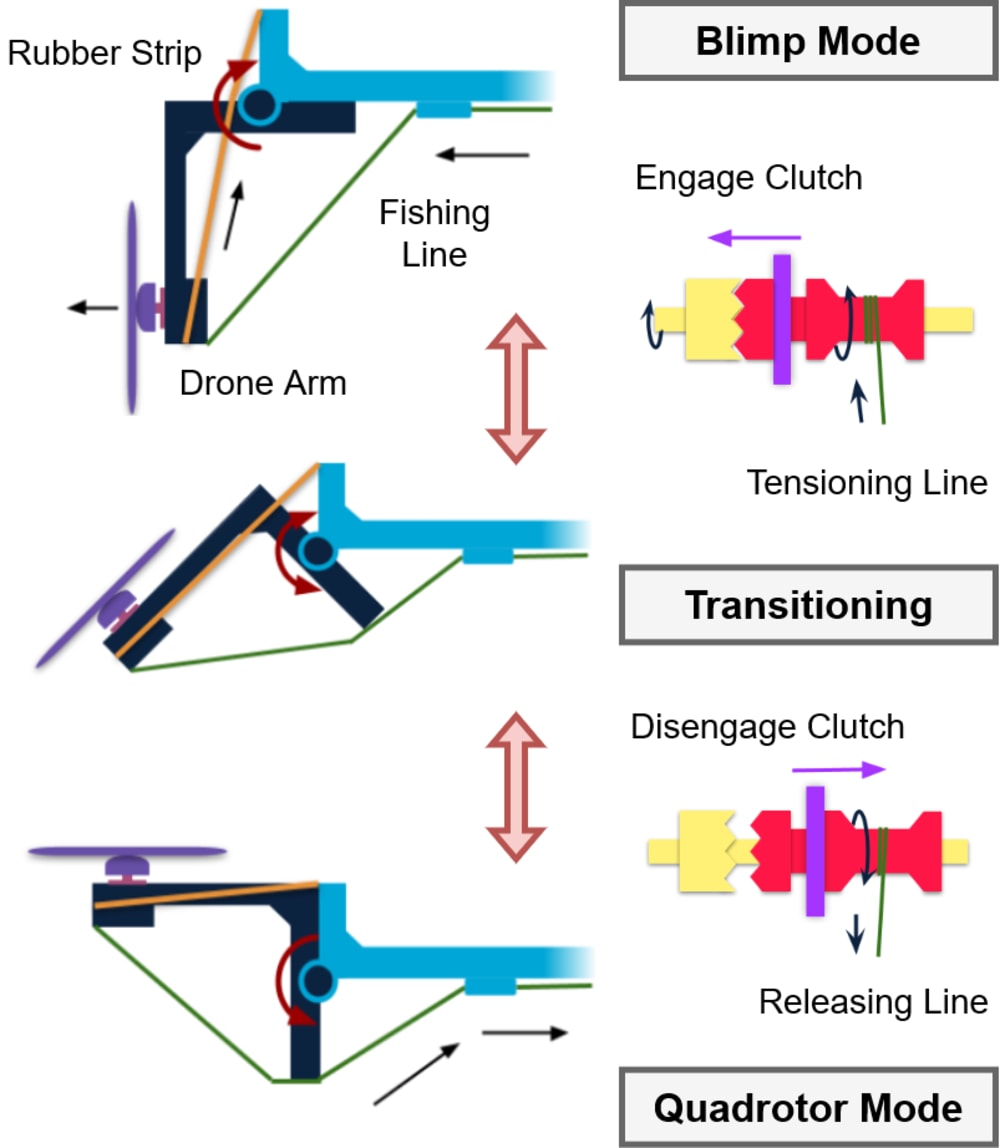
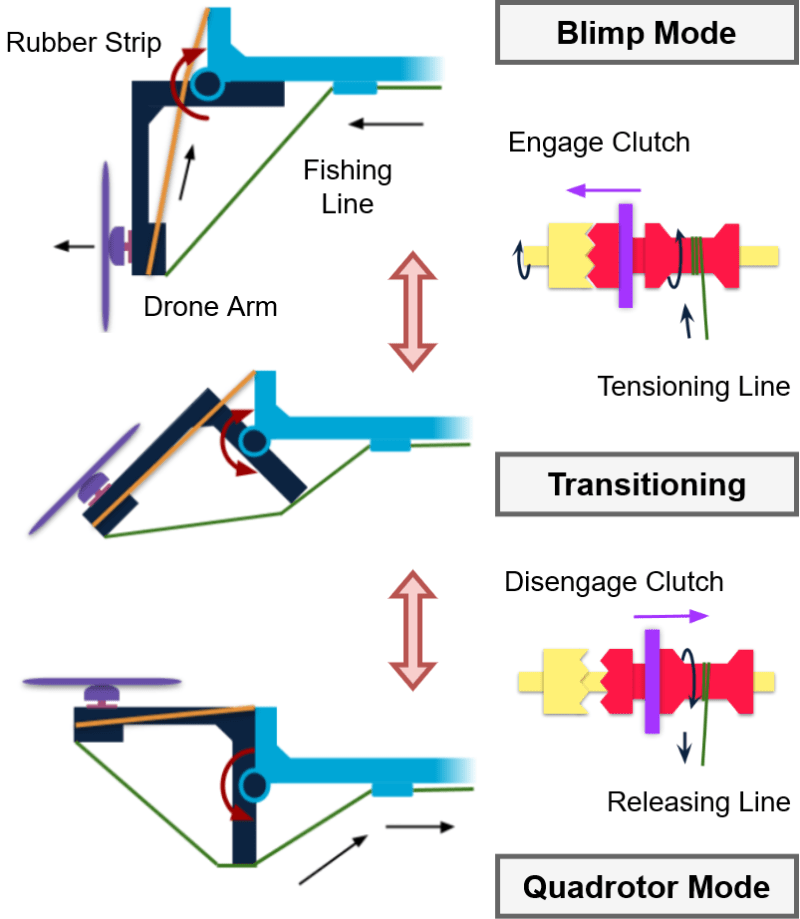
In Janus, the four rotors swivel by 90 degrees when the balloon fails, morphing the platform into a regular quadrotor drone in free fall. In unintentional or intentional balloon detachment, the platform enters free fall, providing a brief window for reaction.
We have developed a robust balloon failure detection system utilizing multiple sensors and fusing their readings. Janus demonstrates omnidirectional mobility in blimp mode and transitions promptly into quadrotor mode upon receiving the signal. Our results affirm the successful recovery of the system from balloon failure, with a rapid response time of 66 ms to balloon failure detection.
The drone morphs into a quadrotor and recovers within 0.362 seconds in 90% of cases. By amalgamating the enduring flight capabilities of blimps with the agility of quad-rotors within a morphing platform like Janus, we cater to applications demanding both prolonged flight duration and enhanced agility.
Janus is designed for low-altitude sensing, complementing other drones for wildlife monitoring and data collection. While not intended to replace stratospheric airships or high-altitude platforms, it can mitigate risks in outdoor deployments that originate from malicious (like poachers) and accidental sources. The platform's ability to hover silently presents a promising avenue for drone-assisted ecology monitoring.
-
Awards
-
 2024 Top 100 Entries
2024 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Suryansh Sharma
- Type of entry:individual
- Patent status:none