
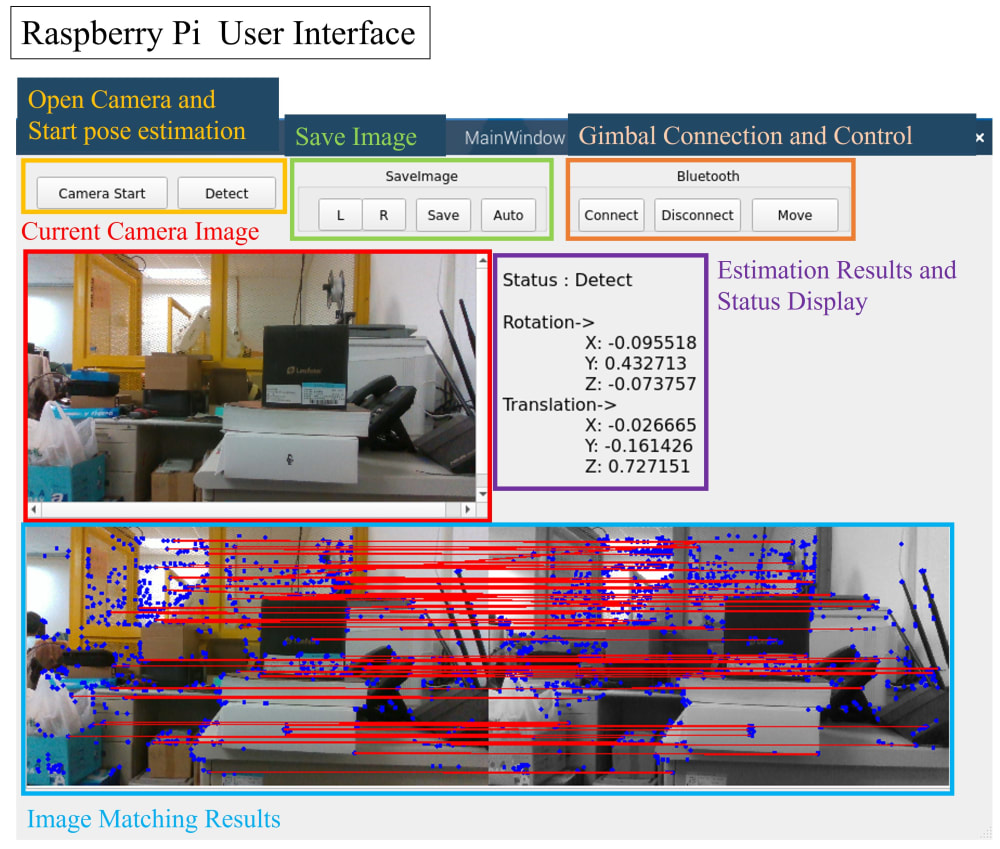
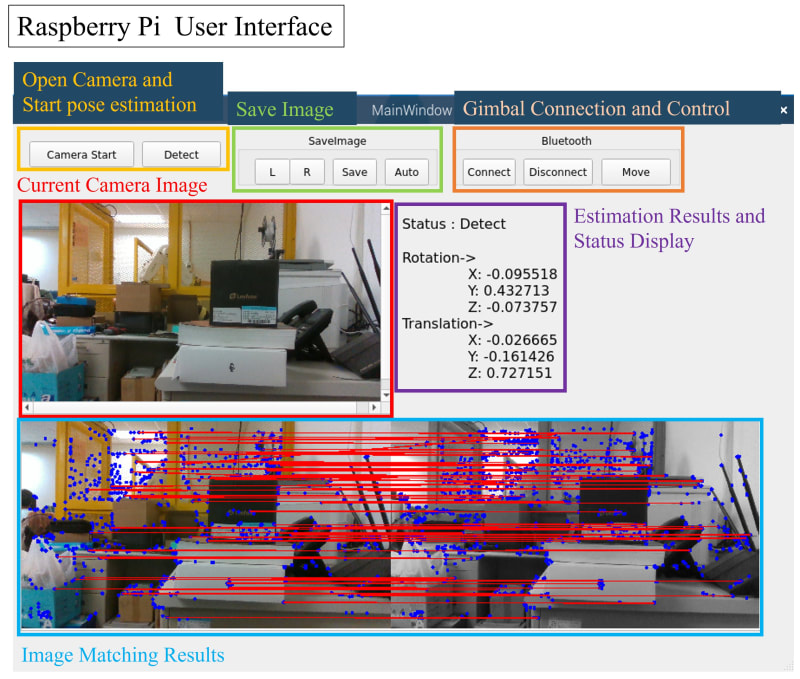


With the rapid development of imaging technology, many methods have been proposed to assist in the management and monitoring of cultural heritage through imaging technology. Most imaging monitoring systems rely on fixed-angle image processing, which significantly increases costs. To address this issue, this paper proposes a monocular camera pose estimation and calibration system. This system can capture images from the same viewpoint at different time points and is implemented on Raspberry Pi single-board computers. Camera pose estimation is based on comparing the current image with previously captured images and calculating the difference in camera pose between them. If the current camera pose is the same as the previous shot, the estimated pose difference will approach zero. Using a monocular camera suffers from scale uncertainty, which results in inaccurate displacement estimates,Therefore, during the first shooting, this system uses the parallax principle in binocular vision to establish the three-dimensional information of the image. Subsequent pose estimation is based on the established three-dimensional information, thereby improving calculation accuracy.
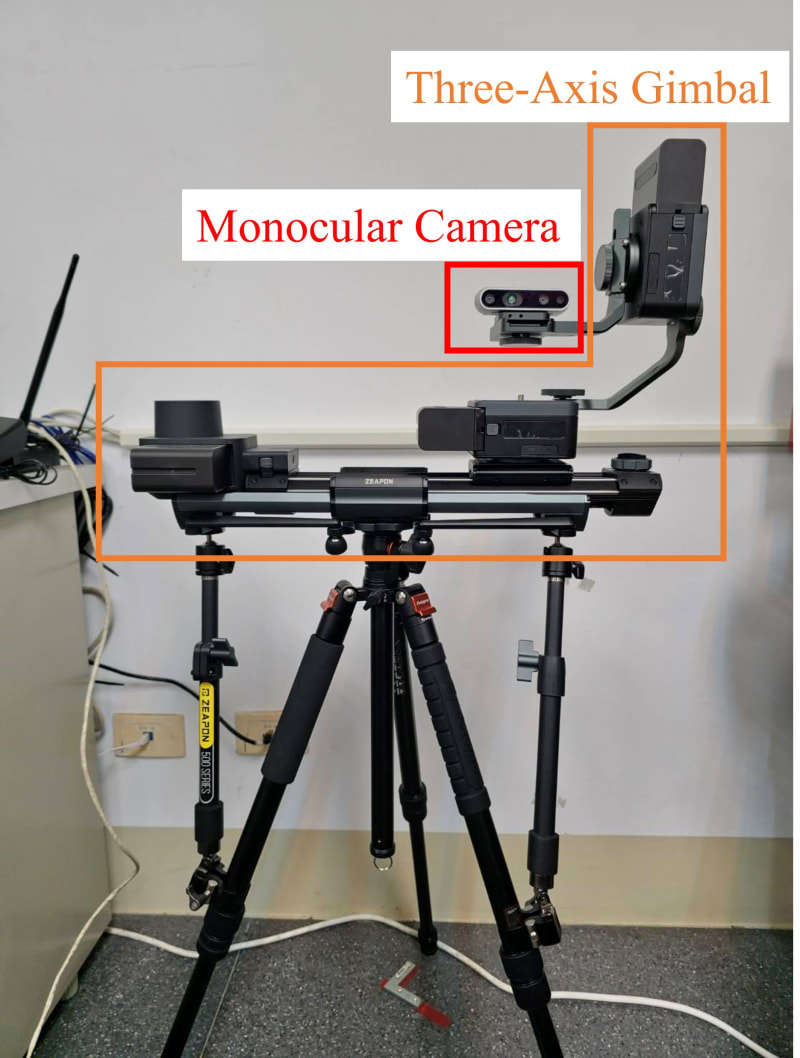
To enable shooting in museums, this system is composed of a Raspberry Pi single-board computer and a three-axis gimbal. The Raspberry Pi is powered by a power bank, while the three-axis gimbal is powered by camera batteries. Therefore, this system does not require an external power source, thus enhancing its portability and practicality. Raspberry Pi communicates with a three-axis gimbal via Bluetooth. Based on the estimation results, the system calculates the movement direction and speed of the gimbal, converts these commands into Bluetooth signals, and sends them to the gimbal to achieve automatic camera pose calibration. When the estimated value is less than the preset threshold, the system will automatically stop the calibration process and acquire the current image. After the calibration is completed, template matching is used to calculate the pixel deviation between the images taken before and after the calibration. The calculation results show that the pixel deviation can be less than 3 pixels on the Raspberry Pi system, demonstrating the feasibility and accuracy of the proposed system.
Like this entry?
-
About the Entrant
- Name:Xuan Ni Chen
- Type of entry:teamTeam members:
- Zheng Jie Liao
- Patent status:none