




Innovation
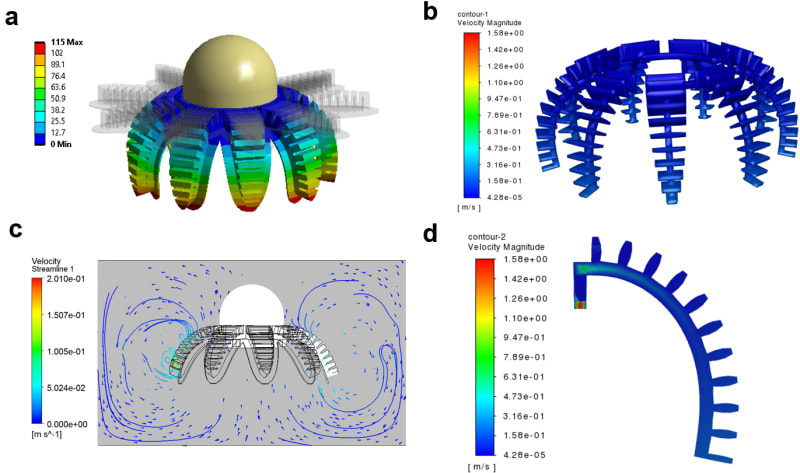
The soft robotic jellyfish stands out due to its bioinspired design, mimicking the natural propulsion mechanisms of real jellyfish. This design utilizes submersible impellor pumps connected to each hydraulic network actuator group within the jellyfish, creating an efficient and novel propulsion system. The propulsion is tested using three different actuation schemes across multiple frequencies on an inline load cell. It was found that a full stroke actuation scheme at a set of frequency produces the greatest thrust, representing a significant advancement over traditional underwater propulsion methods.
Our goal extends beyond technological innovation. We aim to leverage the appeal of the ocean's diverse and fascinating life forms to engage the students in STEM education. By teaching principles of biomimicry and soft robotics, we empower students to create their own robotic solutions that imitate subaquatic biological organisms. This project includes providing fun and engaging kitted robots for students to build, modify, and improve, and organizing public competitions for students to test their designs. This initiative aligns with the goal of developing next-generation STEM Education aquatic robotics kits that employ soft, flexible, and waterproof materials and designs, making these technologies accessible to students at various educational levels.
Feasibility/Manufacturability
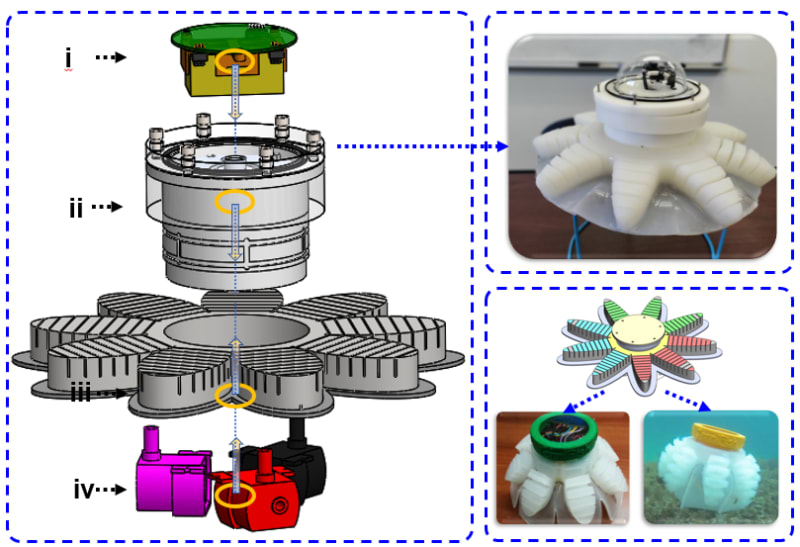
The soft robotic jellyfish is designed with manufacturability in mind. The use of readily available materials and 3D printing techniques ensures that the production process is both feasible and cost-effective. The hydraulic network actuators and submersible impellor pumps are commercially available components, simplifying the manufacturing process. The adaptive bioinspired controller, developed to maintain a predetermined depth using an onboard pressure sensor, has been demonstrated to work effectively in experimental settings. This approach ensures that the jellyfish can be produced at scale without significant increases in cost or complexity.
The educational aspect involves developing enabling hardware and bioinspired soft robotic educational experiences for the students. A modular approach allows a central control canister to wirelessly communicate with pump-actuator modules that can be attached in various configurations to replicate biological organisms. Educational lesson plans will teach students the principles of biological propulsion and soft robotic actuator design and fabrication, enabling them to creatively pursue their designs.
Marketability
The soft robotic jellyfish has numerous practical applications, making it highly marketable. It can be deployed in various marine environments to continuously monitor aquatic life and ocean dynamics. Its ability to operate at depths ranging from 0 to 20 meters ensures it can cover a broad range of marine habitats. The data collected by the onboard sensors can provide valuable insights for environmental policy implementation, marine biology research, and climate change studies. The well-defined market for such a versatile and innovative tool includes governmental and non-governmental organizations focused on environmental monitoring, academic and research institutions, and industries involved in marine exploration and conservation.
Moreover, the educational kits and competitions will inspire a new generation of students to pursue careers in underwater robotics.
Video
-
Awards
-
 2024 Top 100 Entries
2024 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Maohua Lin
- Type of entry:teamTeam members:
- erik engeberg
- Maohua Lin
- Patent status:pending