Electric-vehicles’ ascendance may help save Earth’s future, but may need out-of-the-box concepts to Create that Future, specifically “Back-to-the-Future” thinking: Reconsider 1900’s 33,842 US cars: 22%-ICE, 40%-steam, 38%-electric, including Lohner-Porsche’s petrol/electric-hybrid “carriage” powered by electric-motors inside each huge, balloon-tired front wheel. “Perfection is achieved, not when nothing more can be added, but when nothing more can be taken away.” —Pilot/author Antoine de Saint-Exupéry would appreciate the this project’s target technology, In-Wheel Electric-Motors, for
- Improved Energy-Efficiency/Range: In-Wheels transmit/recover power directly, eliminate energy-consuming drivetrains, reduce design/manufacturing/maintenance complexity/cost/weight/waste, facilitate electromechanical “fail-safe” brakes by exploiting “state-of-the-art” CAD/CAE/FEA design-flexibility enabling “skateboard-platforms” — “small-outside/big-inside.”
- Enhanced Performance/Maneuverability/Stability/Safety: Beyond current AWD/ABS/ESC, independently-powered wheels allow torque-vectoring/steering, precise-control vehicle-dynamics/handling in challenging/emergency driving-conditions.
Wikipedia[1] concludes “The major disadvantage of a wheel-hub-motor is that the weight of the electric motor increases the unsprung weight, which adversely affects handling and ride.”
This project proposes one possible problem solution.
Active suspensions address this disadvantage but all, regrettably, violate ‘Antoine’s Axiom’:
Citroën’s hydropneumatic[1954], (Rolls-Royce[1967]/Daimler-Benz[1975]-licensed,)
Jaguar’s self-leveling/Toyota’s electropneumatic[1986], Infinity-Q45 [1990],
Cadillac-RSS[1993] –“plumbing nightmares” -- until Bose electromagnetic-recuperative milliseconds-response proof-of-concept demonstrator[1994].
Automakers rejected linear-electromagnetics’ weight/space/complexity/cost 2,3],
demoting the technology to clever Bose-Ride truck-driver-seat[4,5,6].
Michelin’s 2008 Active-Wheel Project’s dedicated in-wheel suspension-motor[7,8]
reportedly contributed to its 2014 cancellation[9,10,11].
Ackerman-steering, rear-differential, MacPherson-suspension, AWD, four-wheel-disc-brakes,
“resurrected” rear-wheel-steering – all unequivocally dictate independent total-wheel-controllability.
Alternatively, Back-to-the-Future engineering revisits/reevaluates Faraday’s 1821 Axial-Flux/Permanent-Magnet ‘disc’-motor:
- Emerging in-wheel designs incorporate state-of-the-art, high-torque AFPM “pancake”-motors[12,13,14,15] to minimize:
- Size/Volume: ≤100mmW/≤305mmOD, ≥29kw/L/≥67Nm/L, Weight/ Mass: ≥6.7kw/kg, ≥15Nm/kg (peak)[16,17,18,19]
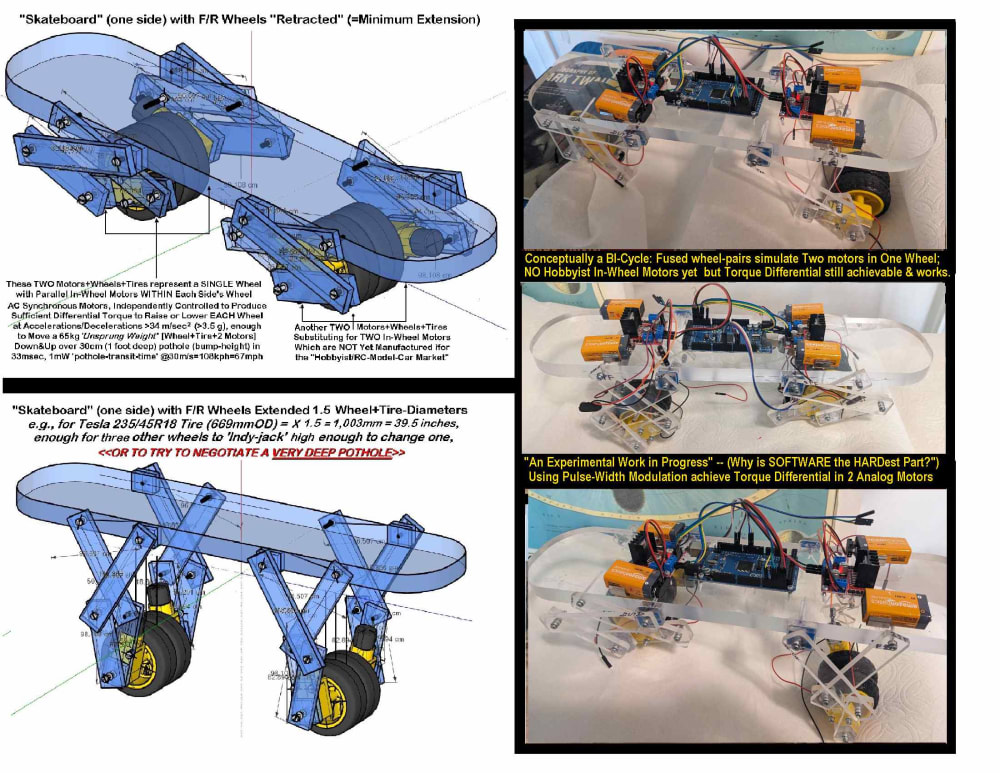
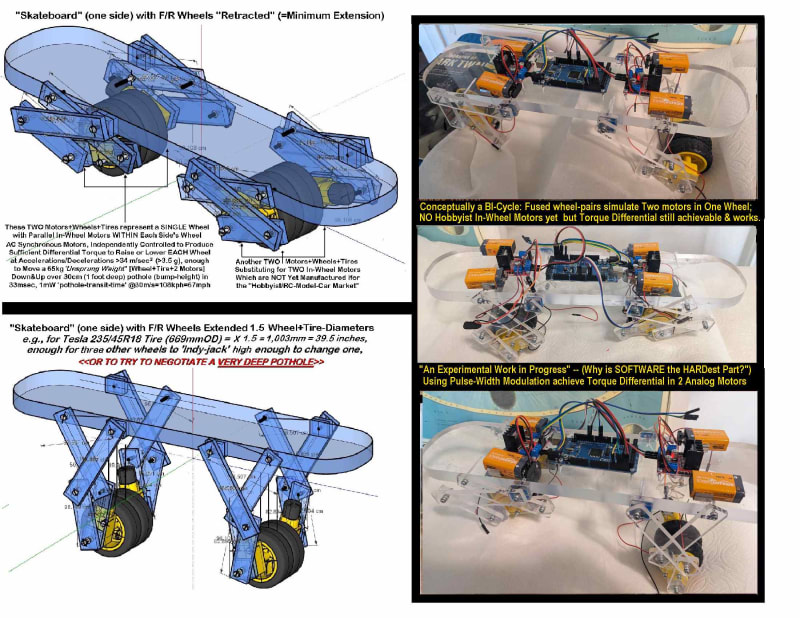
- Peak-outputs (60-85%>continuous) are available momentarily, (e.g., 33ms=1.0m-“pothole-transit-time” @30m/s(67mph);
- Paired-in-wheel, separately-controlled synchronous-motors reliably deliver substantial differential torque –momentarily;
- “Scissor-jack” suspension-mechanisms trades differential arm-torque for high-speed wheel-elevation-change needed;
- Baseline-torque-differential (using sub-second-adjustable constant-torque-springs or slower pneumatics) allows rapid ride-height/vehicle-load-accommodation, e.g., 4x65kg unsprung mass’ vertical acceleration/deceleration 30cm in 33ms:
- 740Nm (=2,220N@333mm-arm,) 34m/s2 over 30cm pothole/speedbump, yields 3,000kg vehicle smooth/level trajectory.
Proposed ‘Drive-by-Wire’ Manual/Automated Control-Modes:
Static/Slow: per-wheel load-sense/height//balance-adjustment, curb-clearing,
assistive kneeling wheelchair/gurney entry/exit;
Mid-Dynamic/manual-select: road-condition/clearance-adjustment avoids ‘bottoming’ (steep-driveway/ramp/hilltop/RR-Xing)
Fast-Dynamic-sensor/computer-select: aerodynamic-lowering ≤109mm (Porsche-911)
w/obstacle-predictive auto-override)
▪auto-flat-cornering/balancing/vectoring,
auto-braking-dive/acceleration-squat-compensation;
auto-headlight-aim-correction;
▪auto-torque-vectoring: turn-inside/outside-wheels speed/torque-differential,
oversteer/understeer-minimization, –and (critical)
▪auto-detection/protection from potholes/patches/cracks, bumps/ruts/washboard, raveling/shovings/bleedings, edge-fractures, uneven-settlings, flawed construction joints.
2023 AAA-report[20] estimates $300-$1,000 annual consumer-cost, too often in ‘paycheck-to-paycheck’ communities.
2021 NHTSA[21] implicates these in >3,200 US traffic-fatalities/>26,500 serious injuries.
Accompanying designs/diagrams propose an implementation.
Flexible specifics simplify exploiting advances in manufacturing, electrical/mechanical-design CAD/CAE-software, contradicting fables “AFPMs are too complex to design and mass-produce.”
Recent AFPM advances: multilayer thin-printed stator-windings (75%-skin/proximity/eddy-loss-reduction yet 87%-Cu-density) monolithic soft-magnetic grain-oriented-Halbach-array rotor-fabrication,
integrated oil-cooling of (printed) stator-“windings” AND NPC-MLI inverter’s 12 efficient-but-thermally-demanding SiC-MOSFETs within R/√3 optimal-minimal stator-coil-inner-radius.
Wherever possible, unique-parts-count is minimized:
164 unique/non-COTS parts:
8 identical 180°-symmetric ‘in-wheels,’
front 46.5°-steering= rear (w/speed-limited 12°-max,)
four 12-coil stator-winding-PCBs
repurposed countering diaphragm-spring planetary-gear clutch AND “fail-safe” normally-retracted brakes.
Even no-cost-R-hand-drive for mail/delivery/export/
Despite ‘thin dual-rotors balance forces, more direct magnetic flux path’…
‘Eight skinny motors per vehicle’ IS intimidating
IF one ignores inherent reflexive economies-of-scale.
Intel’s Gordon Moore (apocryphally) quipped
“The first chip costs $1Billion: second-through-millionth cost $10 each.”
Modern electrical/mechanical design software can take us Back to Our Future.
Like this entry?
-
About the Entrant
- Name:Brian Boyle
- Type of entry:individual
- Software used for this entry:SketchUp2020,MathLab, NASA/NASTRAN FEA, several sim systems
- Patent status:pending