


Conforming to Ackermann steering geometry gives better perception about the turning of the vehicle which is critical while changing lanes in a fast moving traffic and maneuvering around a corner. Bar linkage based steering systems like Ackermann four bar linkage steering system and six bar linkage steering system require racks to hold the linkage bars and is space consuming. Bar linkage based steering systems, undergoes complex planar translations and significantly deviates from Ackermann steering geometry. Deviations are in the form of anti-Ackermann steering, divergent Ackermann steering and transition from anti-Ackermann steering to divergent Ackermann steering and vice-versa.
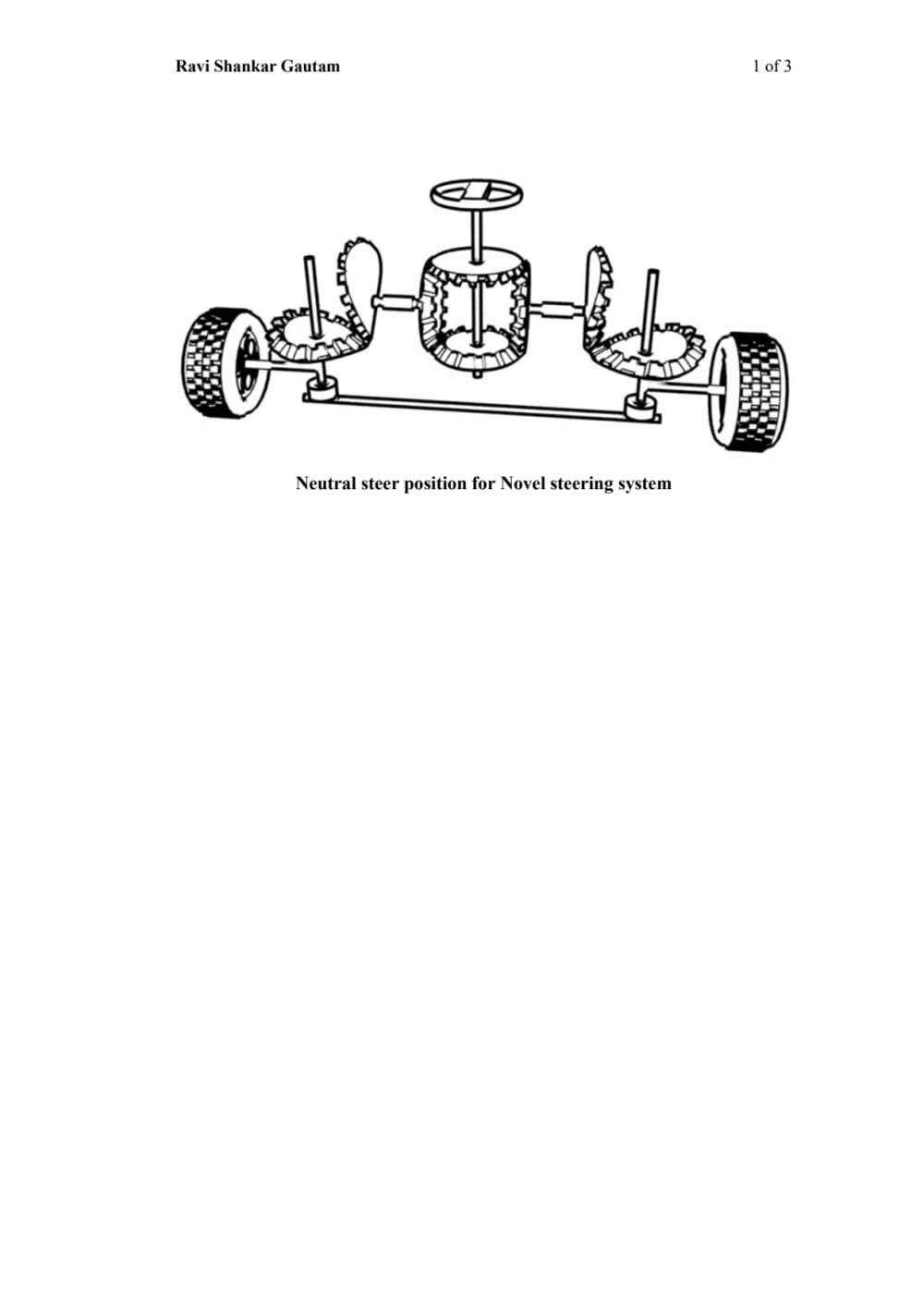
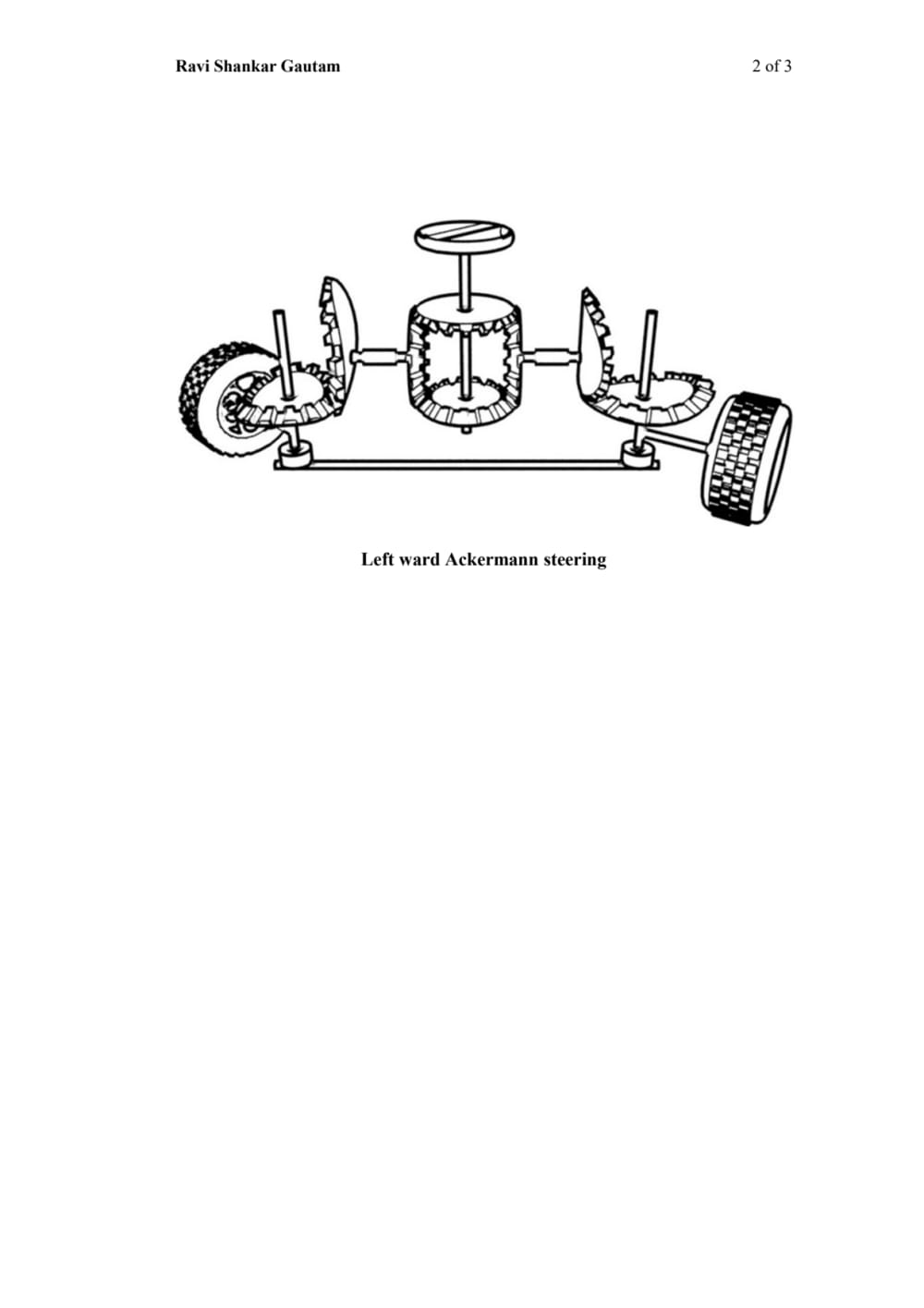
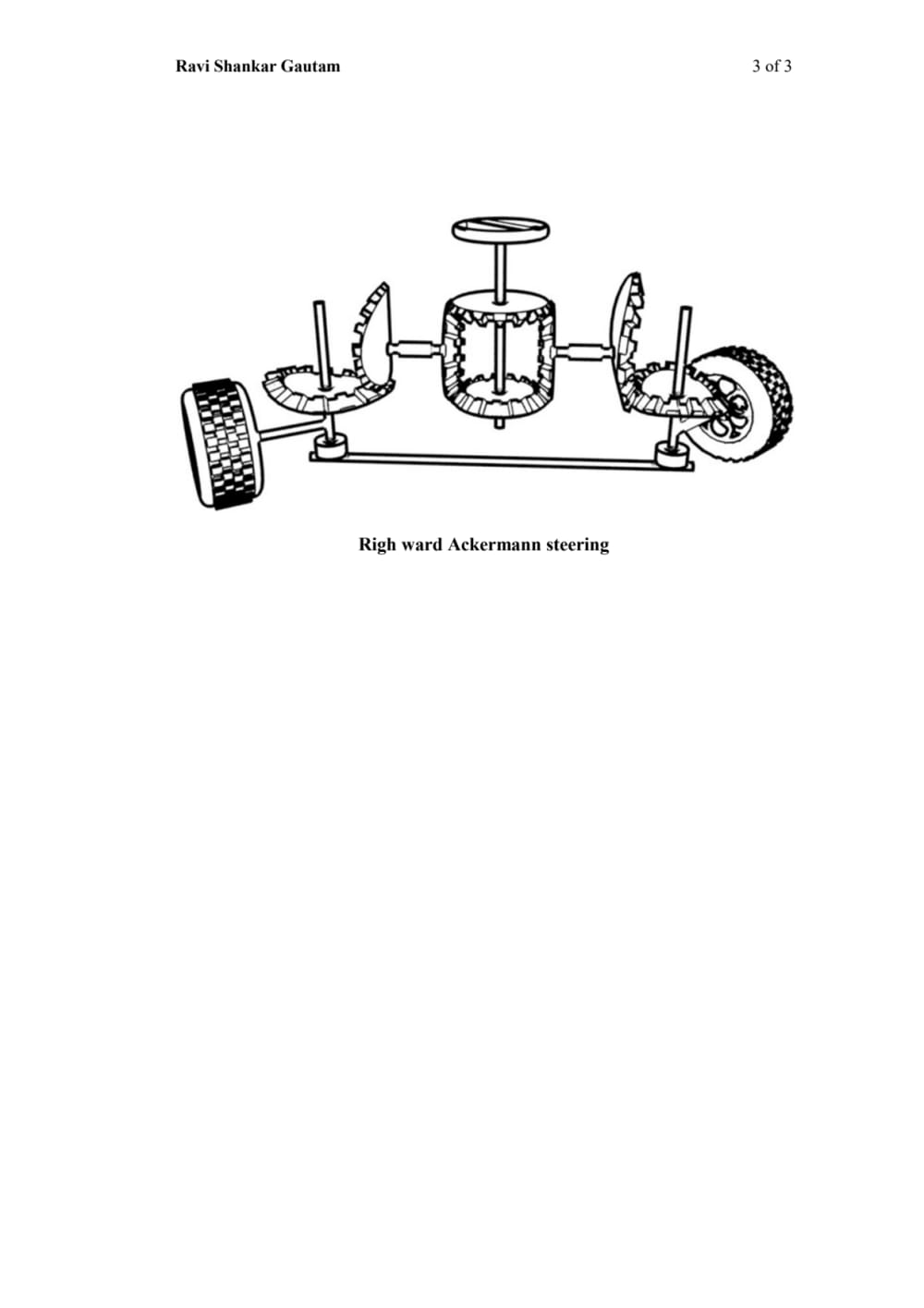
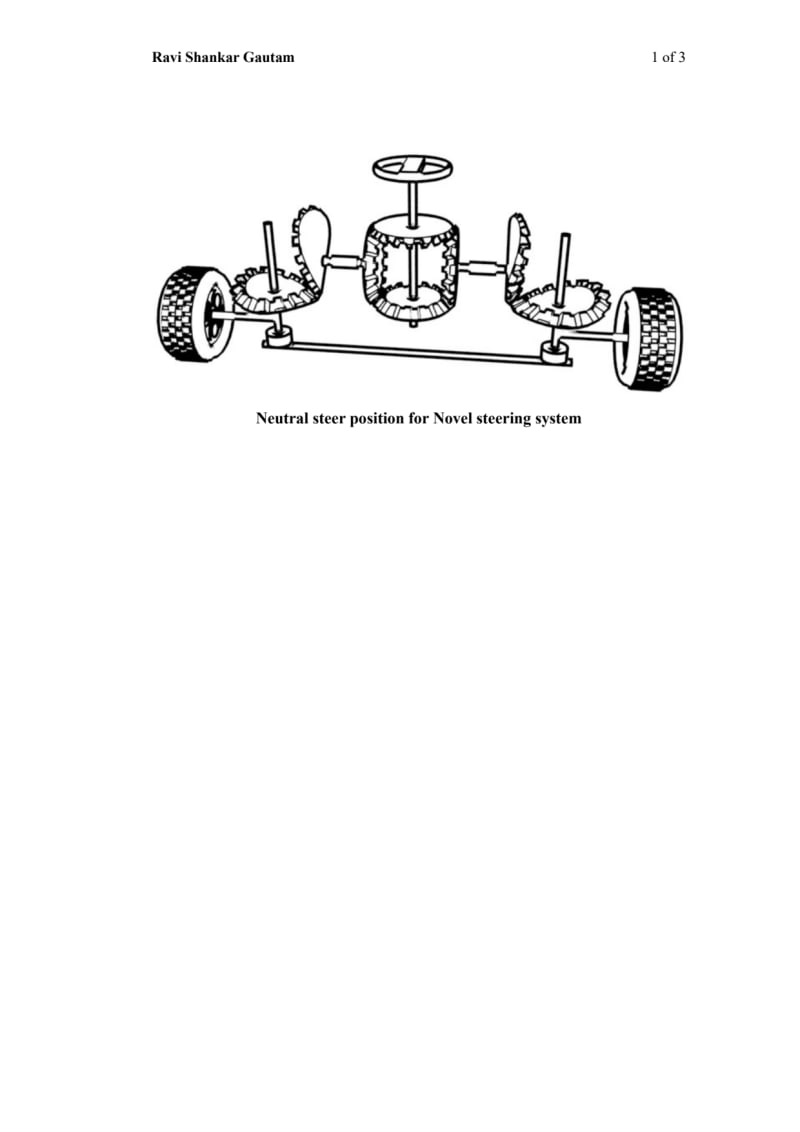
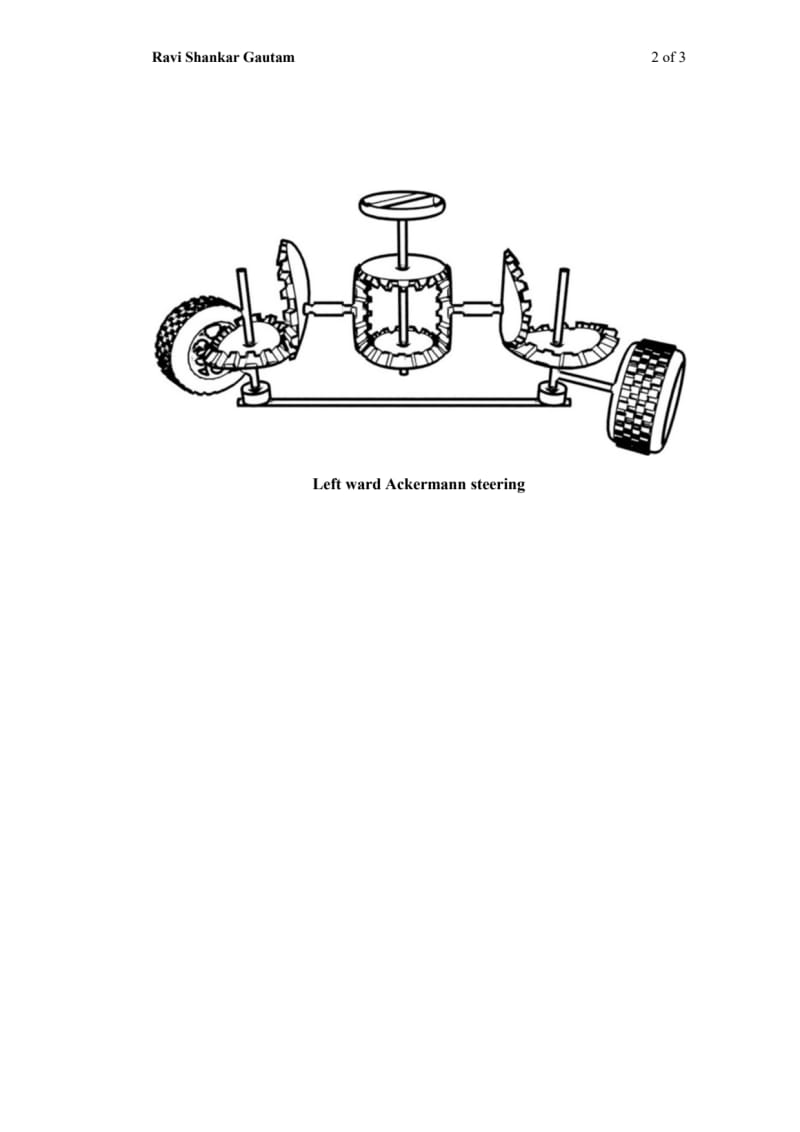
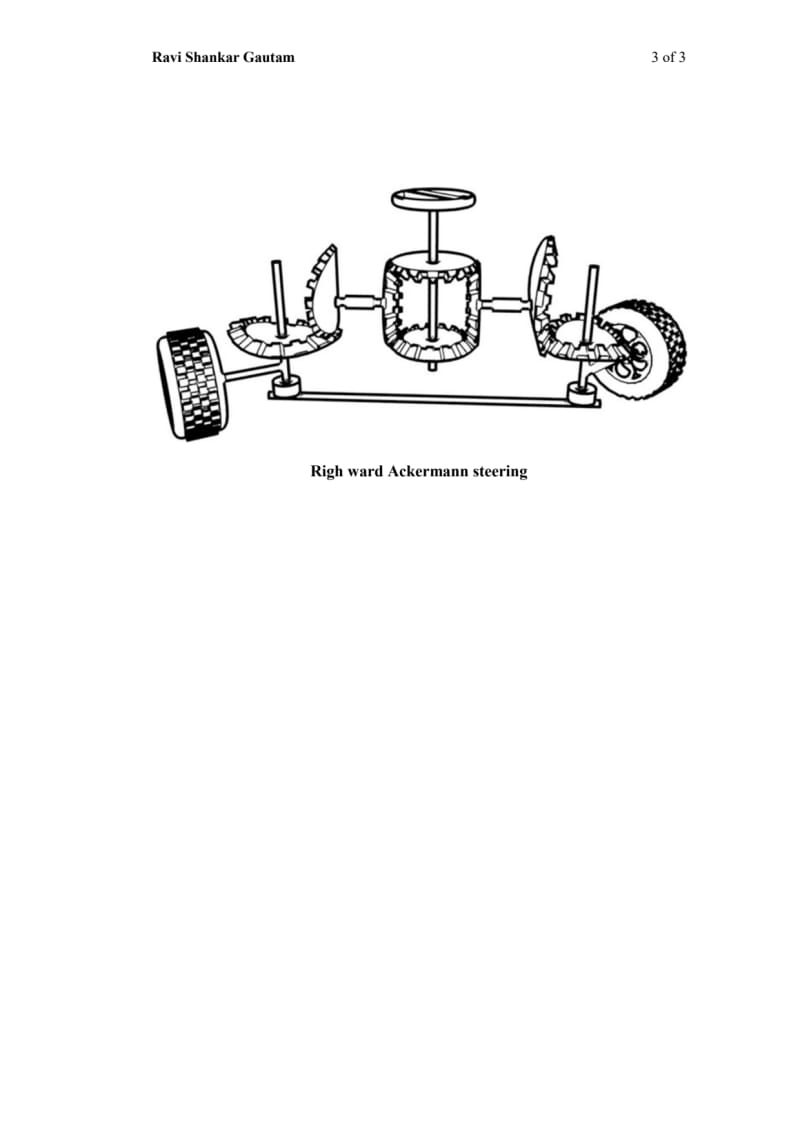
I have invented a novel steering system which uses elliptic bevel gears to provide Ackermann steering geometry. Novel steering system comprises Central Steering Transmission System, Steering Torque Transmission Arms, Left Ackermann steering system and Right Ackermann steering system. Central Steering Transmission System mainly comprises circular bevel gear set and Left and Right Ackermann steering system mainly comprises conjugate pair of elliptic bevel gears. Central Steering Transmission System changes the direction of steering torque from handle to transversely left and right directions. Steering Torque Transmission Arms transmits steering torque from Central Steering Transmission System to Left and Right Ackermann steering systems via axial rotary action of rods (instead of planar translations). Left and Right Ackermann steering systems receives the steering torque, changes its direction and transmits to left and right wheels according to Ackermann condition using geometry of elliptic bevel gears. Neutral Conjugate contact point of conjugate pairs of elliptic bevel gears is plays pivotal role in achieving Ackermann steering geometry. Eccentricity of elliptic bevel gears can be chosen according to vehicle’s wheel base to track width ratio to provide almost accurate Ackermann steering geometry.
Elliptic bevel gears can also be realigned to provide Davis Steering (required for racing cars) without changing Chassis of the vehicle.
I have published a paper and is available at
https://www.sae.org/publications/technical-papers/content/2022-01-5090/
Novel steering system does not require rack and can be integrated with main chassis. It consumes less space and does not require complex translation motion. I have built a prototype of invention with acutely limited resources and built without precision welding etc. I could not avail elliptic bevel gears. This prototype use circular bevel gears and provide parallel steering. Purpose was to demonstrate stability from dynamical point of view. As can be observed even after collisions steering system does not break down. All the components are concealed and protected from dirt and mud. More importantly prototype model can steer turn the wheels by 360o without using in-wheel motor.
I have filed patents for two steering systems which are improvements to Novel steering systems in different aspects. In one improvement elliptic novel gears are located in central steering system and left and right steering system comprises circular bevel gears. In the other improvement left and right steering system comprises elliptic bevel gears but central steering system comprises worm-pinion gear set and steering torque transmission arm is a continuous rod. This latter improved steering system is significantly lighter in weight.
Video
Like this entry?
-
About the Entrant
- Name:Ravi Shankar Gautam
- Type of entry:individual
- Software used for this entry:Octave
- Patent status:pending