

Project Proposal: Third Generation Precision Space Flight and Landing Systems
Our project aims to explore and evaluate a novel third generation of flight systems that go beyond the concepts of birds and airfoils, enabling precision space flight and landings using collapsible thruster-foils. By combining nature-inspired systems and morphologies with large area addressable array microthrusters, we can achieve precise space propulsion and control. When integrated with collapsible adaptive robotic leg systems, core navigation, computing, and communication subsystems, this technology opens up new possibilities for precision rocket landings on irregular surfaces.
Technical Approach:
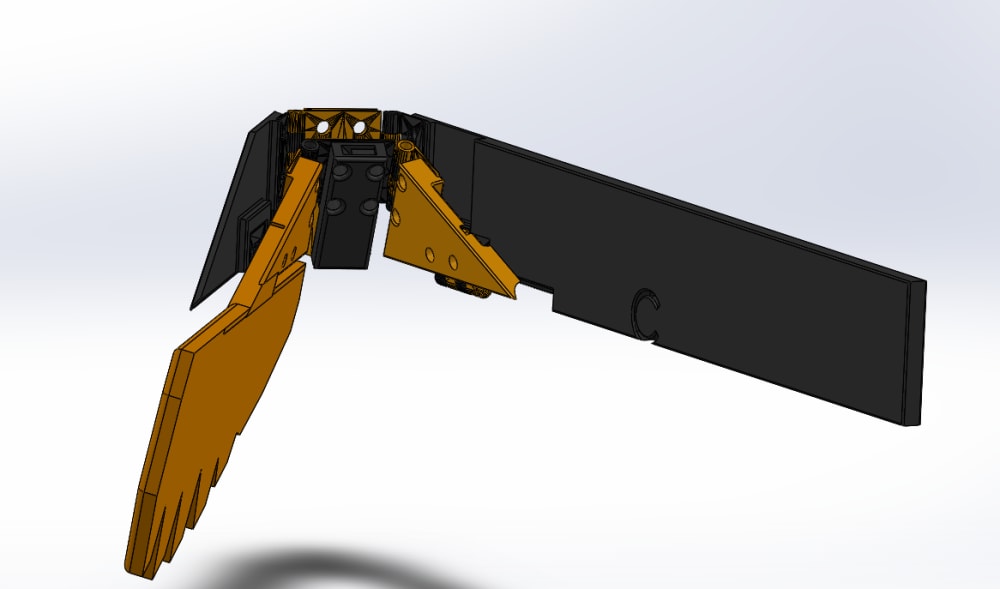
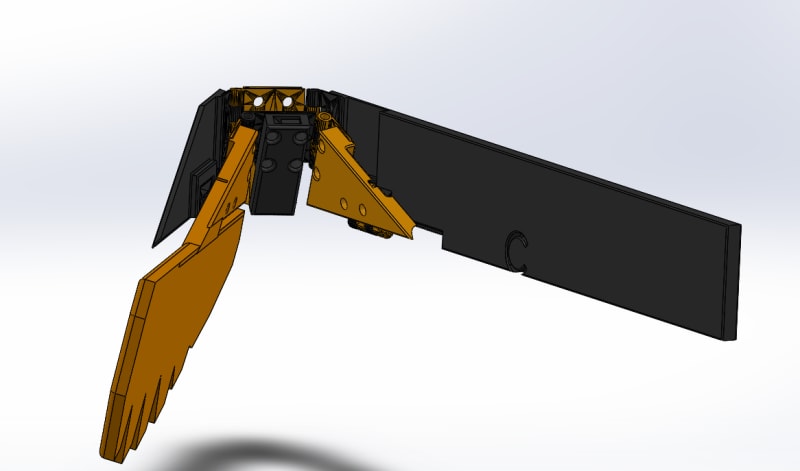
Collapsible Vacuum "Lift" Wings for Precision Propulsion and Landing Control: Building on our understanding of avian wing design, we will develop avian wing joint architectures that allow for folding and unfolding mechanisms similar to birds. By utilizing 3D motion joints, non-planar mechanisms, and slotted bend-twist helicoidal motion slots, we can create a mechanism that mimics the functionality of avian wings. This approach will provide the foundation for our collapsible "vacuum lift" flight control systems, which enable precise propulsion and maneuvers for landing control.
Central Core Controller, Navigation, and Communications System: We will leverage our expertise in developing a mobile quantum communication node for secure communications. Using a Cubesat-based carrier system, we will integrate the necessary controller for addressable propulsion arrays and motor legged distributed motion control. This central core controller will handle navigation, communication, and overall system control.
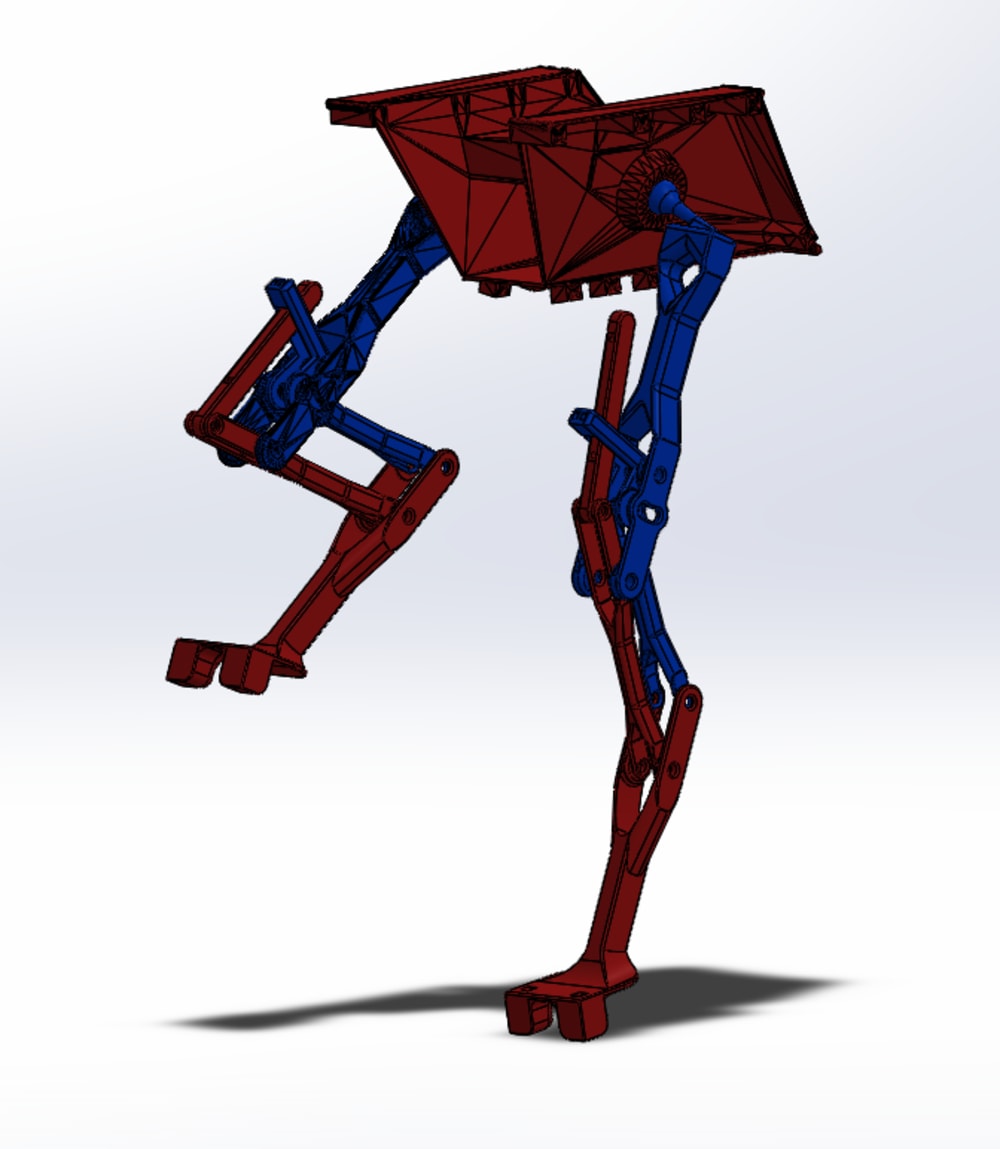
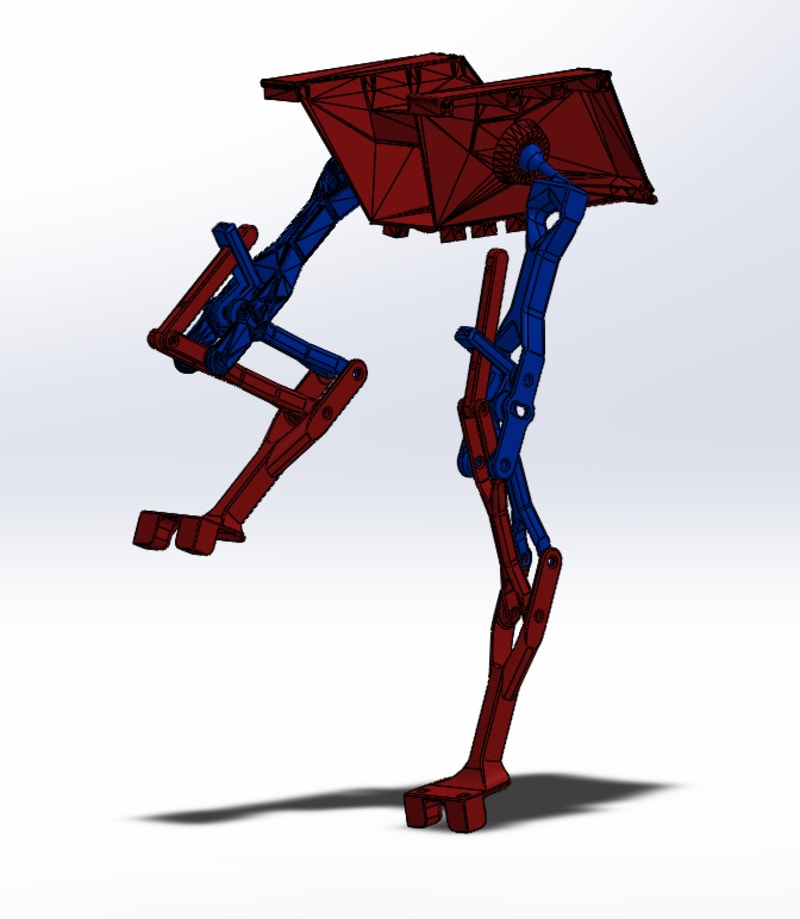
Collapsible Adaptive Robotic Legged System for Precision Landing: To achieve precision landings on irregular surfaces, we will advance the science of legged robotic systems. By employing nonlinear 2D resonant legged robots and expanding them to a full 3D legged stable resonant simulation, we can test and evaluate their performance. Our approach involves using minimal controllers that rely on nonlinear resonance and emergent behaviors within configured resilient complex networks. This will enable dynamic geometric stability, robust reactive resilience, and adaptability for landing on various surfaces.
Enabling Production Technology: Large Area Surfaces Microstructuring: We will develop a large area robotic production system capable of fabricating micro-fabricated structures on non-planar surfaces. This system will support the production of collapsible vacuum "lift" wings and other integrated electronic systems. By employing automated manufacturing techniques and leveraging our expertise in PCB-MEMS technology, we can achieve precision and efficiency in producing large area 2D and 3D integrated architectures. The system will include patterning, metrology, microscopy, AI-machine vision, and interconnect functionalities.
By integrating these subsystems, we will create an innovative precision space flight and landing robotic system. This system can be used as a standalone rocket landing system or adapted as an exo-system for traditional cylindrical rocket platforms. Our project will evaluate the feasibility, efficacy, and scalability of these technologies, paving the way for advancements in precision space flight and landing capabilities.
Video
Like this entry?
-
About the Entrant
- Name:David Michael Patchanian Jr
- Type of entry:individual
- Software used for this entry:Yes.
- Patent status:none