




There are a lot of data and papers describing how the presence of water is problematic in remote sensing. We use this problem as the source of information.
Application
An indication of surface information (water/soil) helps these in these three applications:
- Amphibious seaplanes are easily wrecked when landing on water with wheel landing gear down. Aircraft will somersault upside down instantly when wheels hit the water.
- A helicopter pilot flying low level at night and using night vision goggles has a poor visual indication of whether he is over a water surface or flat ground.
- Autonomous UAVs of longer range with only a map database have a hard time if water lever changes, e.g., tidal effect.
Background
Reflection
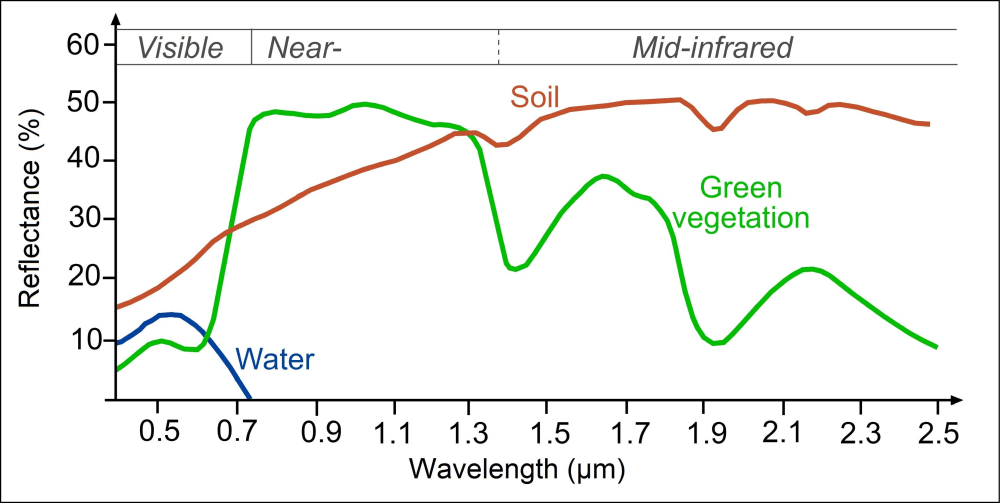
Water's surface reflects about 10% of visible light. Soil/vegetation/rock (S/V/R) reflect the same.
Water has negligible reflectance in near-infrared (NIR). S/V/R reflects more in NIR than visible light.
This is standard information in the field of remote sensing.
https://seos-project.eu/classification/classification-c01-p05.html
A millimeter wavelength radar wave reflects equally well from ground or water surfaces.
Absobtion
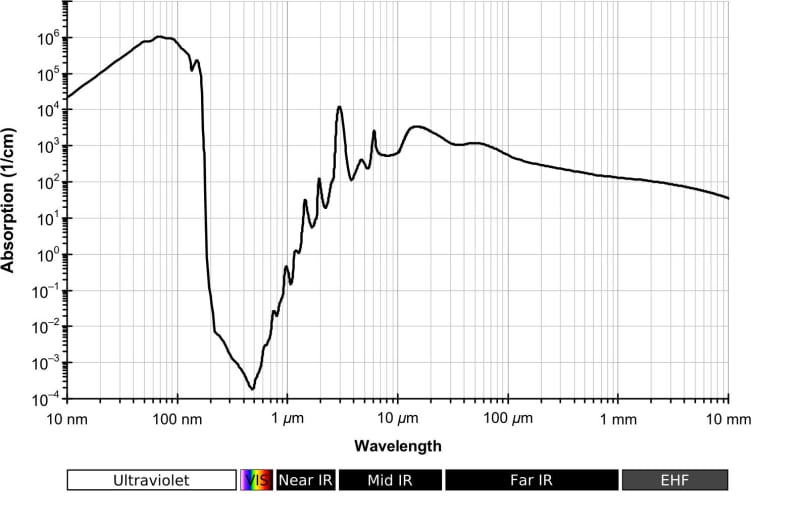
Water is transparent in visible light. In NIR, the attenuation of water is about 106 times higher.
S/V/R is non-transparent.
http://en.wikipedia.org/wiki/Electromagnetic_absorption_by_water
Principle
At least two subunits operating at different frequencies are needed. Frequencies are chosen so that the reflection and absorption properties of the ground and water differ and change oppositely.
Subunits can be either distance or reflection measurements.
Distance
For example, using radar in the millimeter range (81 GHz) and a NIR device in the 1310 nm range, measuring the aircraft's height.
The surface reflects at both frequencies equally.
Over water, the absorption in NIR is high, and no reflection happens.
It is a solid surface if both distances are the same or the laser distance is less than the radar distance.
If the laser distance is greater and the NIR measurement does not get a result, it is water.
Reflectance
Two lights are used, 610 nm of the visible range (red light) and 1310 nm of the NIR range.
In water, the difference in absorption is 10000 times. The reflection of red light from the surface is about 10%; NIR is not reflected at all.
There is no reflection difference from the S/V/R. There is no difference in absorption.
E.g., sending pulses with a frequency of 1000 Hz and investigating whether the light in this frequency is reflected. Pulsed reflection is a way to filter sunlight reflection.
If over the ground, both wavelengths are reflected and are perceived equally. Overwater, NIR is absorbed and not reflected. Red light is reflected. If the intensity is equal, there is ground below. If the reflection of NIR is less, water is underneath.
Production
The system has an approved patent.
If an aircraft has a radar altimeter, only one additional sensor is needed—a laser (NIR) distance or a reflection sensing unit. Otherwise, two sensors are needed.
A logic unit is needed to compare the input of the two sensors.
-
Awards
-
 2023 Top 100 Entries
2023 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Aki Suokas
- Type of entry:individual