

Problem
To select target specifications, SHSSP22 participants reviewed literature in space applications (engineering), management and business (human performance), science (humanities), policy (ethics), and law (law and ethics). The research uses AI and ML to define an application's functional requirements and make system design recommendations. The prototype is a computational model that meets the requirements for determining the best construction location for terrain access based on the utility of the construction. A computational model is used to optimize construction access in the prototype. The modularity of the prototype allows for comprehensive construction site optimization. The proposed system's ethical, policy, and legal implications are discussed. Then, extensions and enhancements are proposed, such as applications for future on- and off-Earth expeditions and commercializing AI/ML as a service. The team used AI and machine learning to optimize the design specifications for a lunar outpost. This book offers interdisciplinary perspectives on how to apply this technology effectively.
Methodology
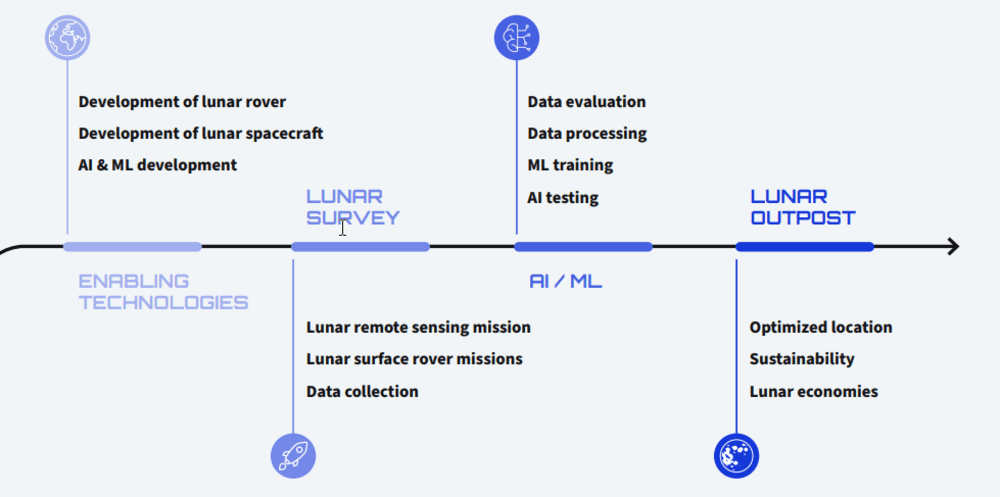
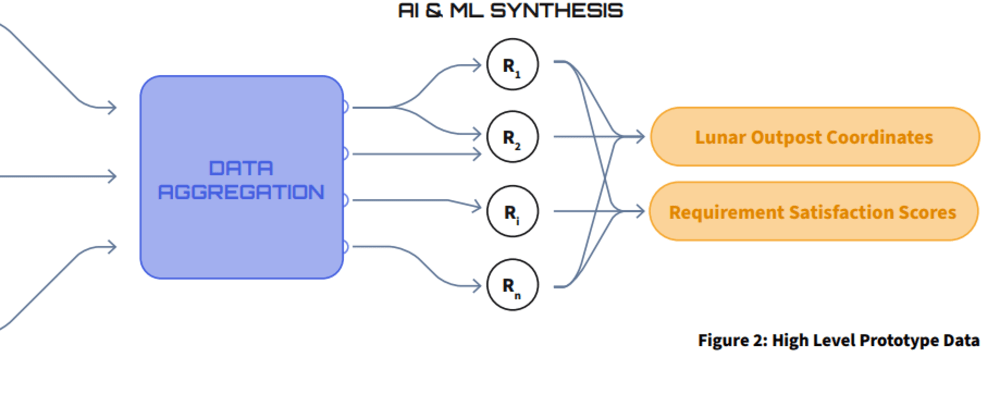
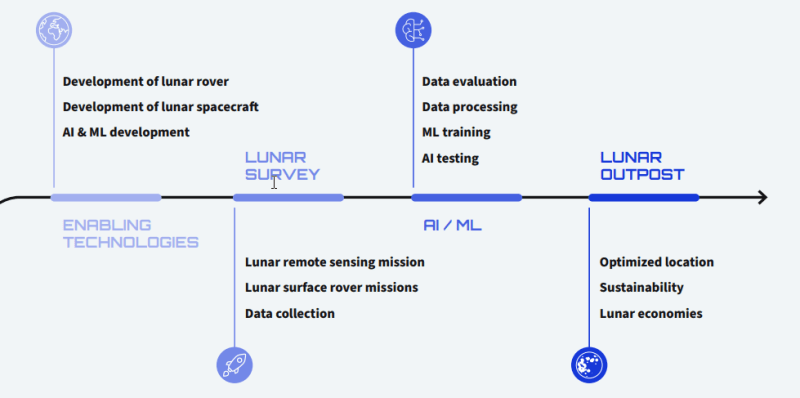
The prototype's application in determining the best lunar outpost location demonstrated its utility. Transportation, resource availability, power generation, legal, ethical, and humanitarian responsibilities, management and financial requirements, and human health were all considered. An invaluable data source was created to cross-reference potential lunar base locations in real-time. This was taken into account when developing the application, allowing the team to create an exclusion set of sites based on previously collected lunar data that did not meet functional criteria. After eliminating unsuitable locations, the remaining options had to be matched. This was simple.
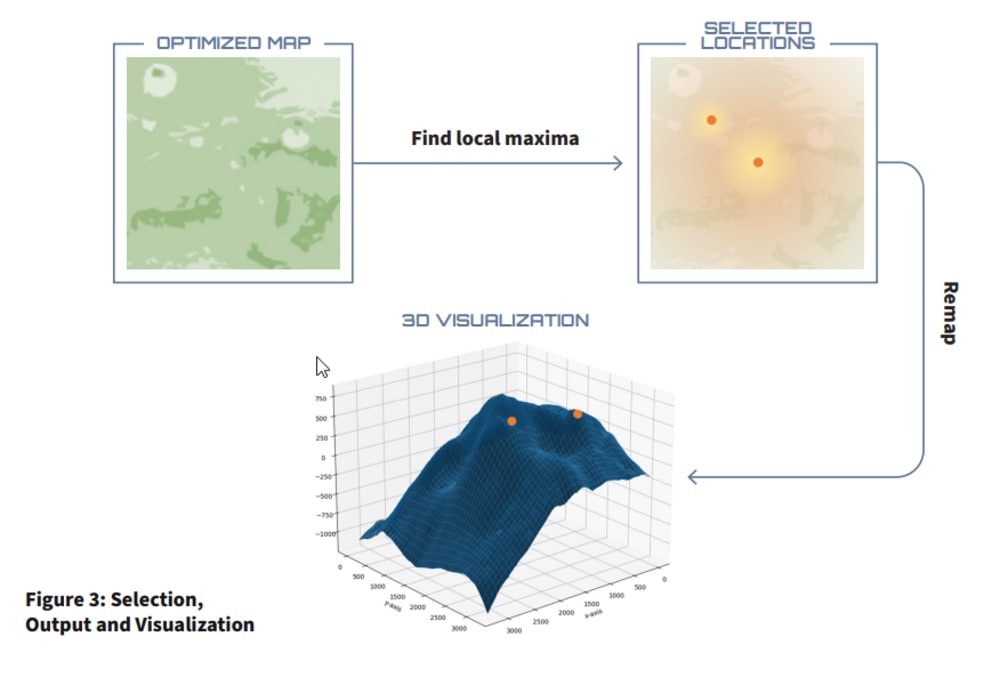
This method reduces human environmental impact while meeting our requirements for solar exposure, terrain access, and scientific diversity. Using satellite and rover data, the system investigates the Moon. Large-scale Earth-related data can help with decision-making as well. Each requirement necessitates the use of detailed mathematical procedures on Moon data. These rules determine whether or not a location is suitable for a human outpost.
Results
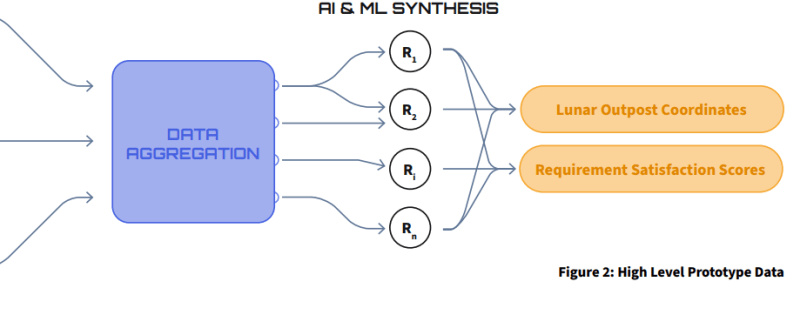
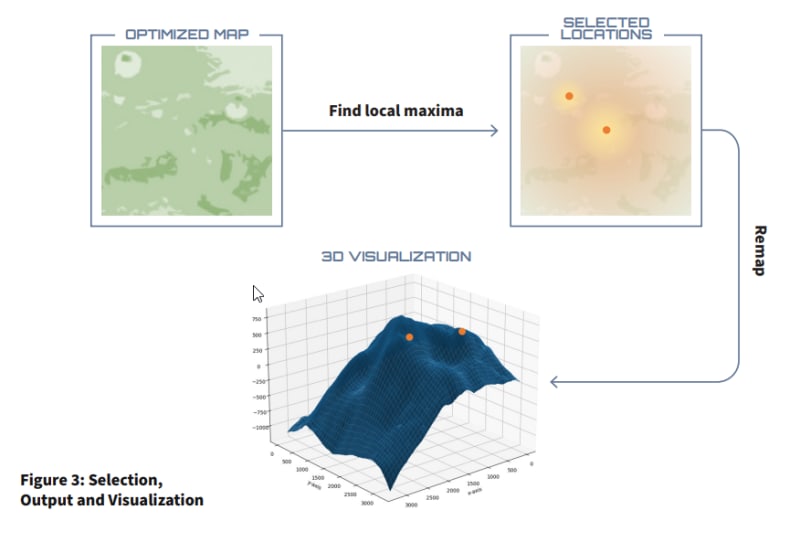
The algorithm uses weights to prioritize requirements. Machine learning techniques, such as training on expert-suggested human settlement sites can be used to optimize these weights. The above technology was prototyped to meet terrain access requirements. The LRO-LOLA equipment from NASA was used to collect topographical data for potential landing sites such as the lunar South Pole (Barker et al., 2021). The study focused on Geo Tiffs at five m/pix, slope maps, and surface-interpolated elevation maps.
Futures
The proposed method is a modular, interconnected tool that assists in determining the best location for a construction project based on utility needs. Commercial, legal, policy, ethical, and cultural concerns, dependencies, and roadblocks have been discovered during research into the viability of this tool. Underground elements, using unique data from future missions, and adapting the design to outpost terrain are all possible additions and improvements.
Video
Like this entry?
-
About the Entrant
- Name:Maria Konstantinou
- Type of entry:individual
- Software used for this entry:GitHub/Python
- Patent status:none