





Problem
The commercial trucking industry is a major source of carbon emissions worldwide. The emissions depend directly on the efficiency of the powertrain that is handled by drivers who care more about reducing trip time and driving comfort than about the environment. Since, fleet owners or logistics companies for whom these drivers work have no way to remotely track driving behaviour or engine efficiency, large amount of fuel is wasted.
Solution
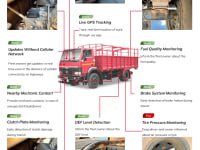
There are commercially deployed solutions that track the truck`s GPS location while not monitoring the driver or components. We propose Trukdoc, an integrated IoT-based platform to reduce the overall carbon footprint of commercial vehicles. TrukDoc aims to support fleet owners and empower truck drivers by tracking vehicle health in transit to provide early detection of common vehicle problems and driver monitoring, using our truck telematics solution to reduce costs incurred per truck and boost safety through the decreased risk of accidents. Less physical damage to components translates to less replacement of parts lowering the overall carbon footprint. The key features include monitoring of truck components like the brake, clutch, axle, and tires, detecting driver drowsiness and getting updates even without a cellular network, among others.
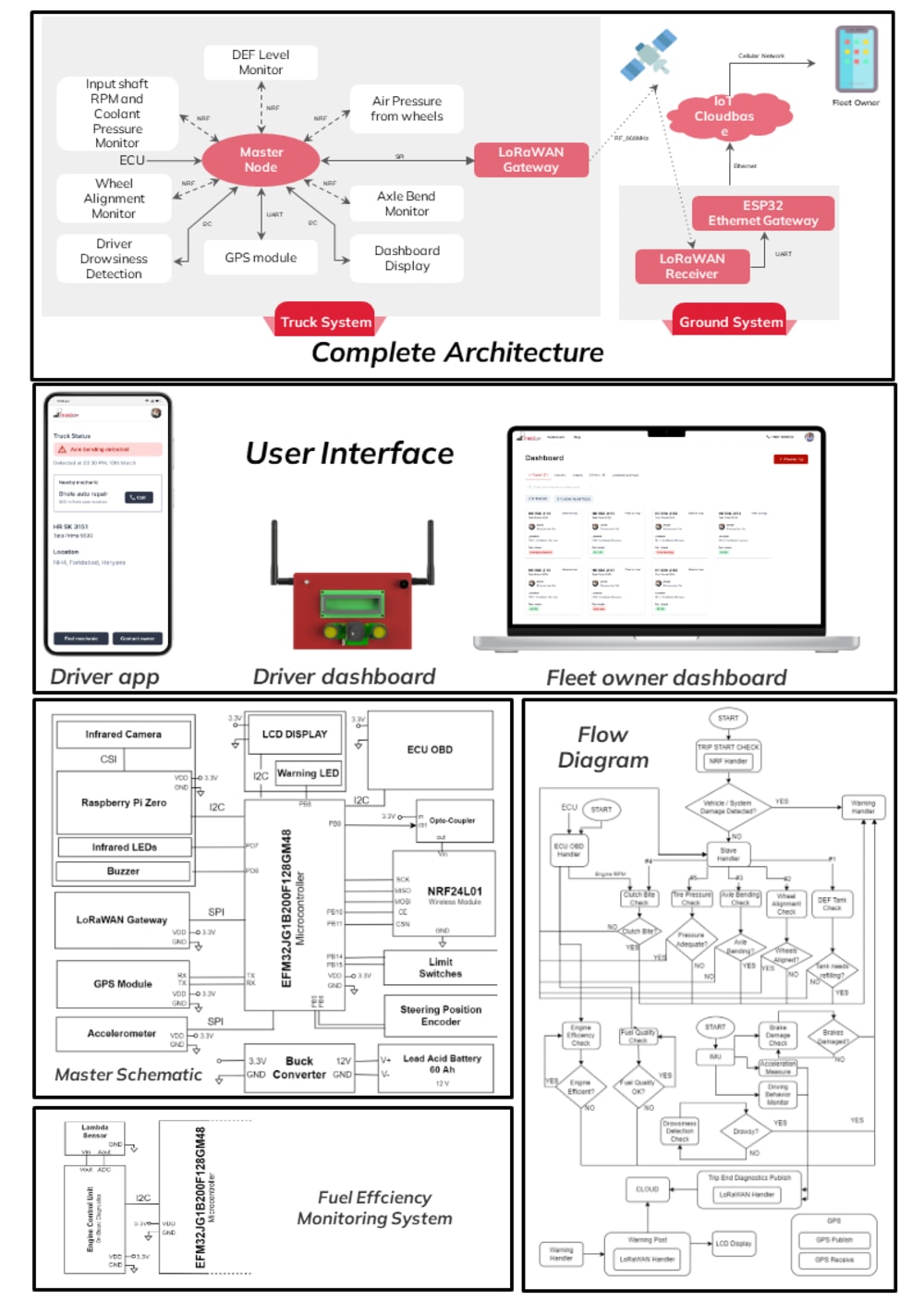
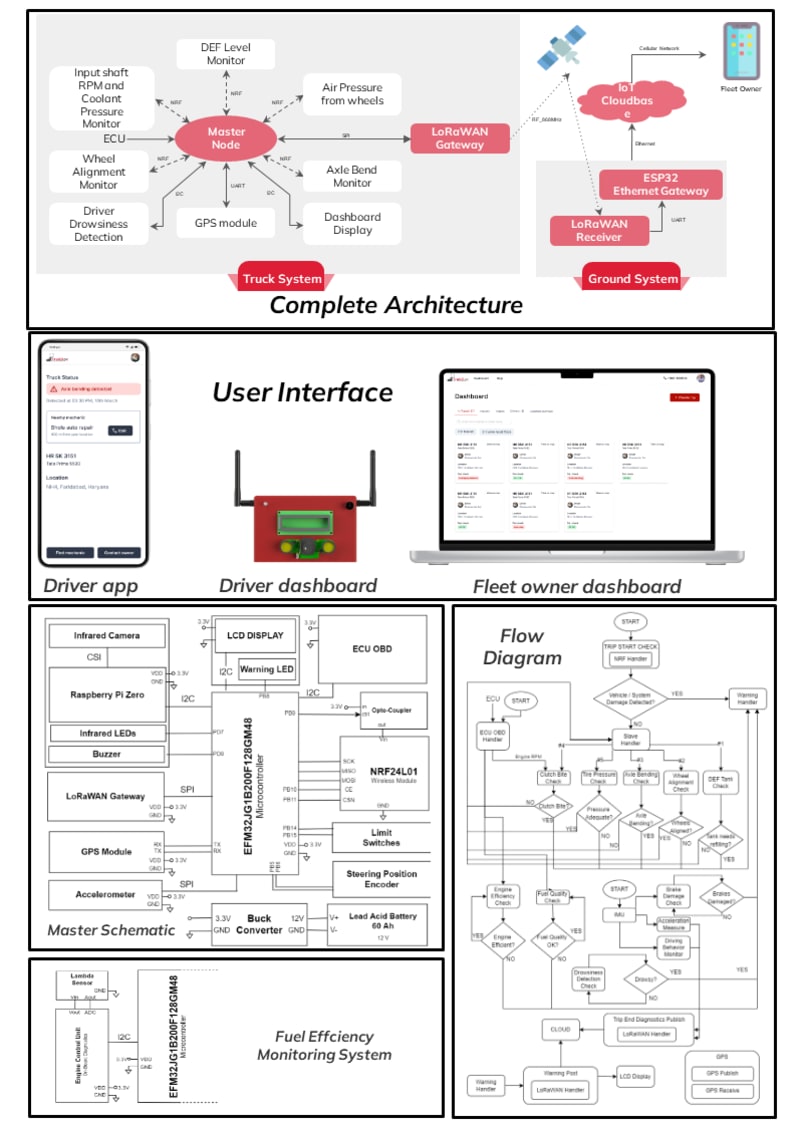
Individual slave nodes monitor different health parameters and send warnings to the Master in case of an anomaly. The master relays the warnings along with the GPS coordinates(sampled every minute) to the cloud. Additionally, it warns the driver through a dashboard display in case inefficient driving or component damage is detected. From the cloud database, GPS stream, notifications and analytics are sent to the fleet owner`s dashboard, accessible on any mobile device.
Implementation
A Master-slave architecture is used with individual slaves pre-processing sensory data locally to detect anomalies and relaying them to the Master. The Master collects warning flags from the slaves, warnings generated by the driver drowsiness detection, driving behaviour monitoring and fuel efficiency monitoring units and the GPS location of the truck at intervals of one minute and relays it to the cloud through a LoRaWAN gateway relaying it to LoRaWAN satellites (which upload it to the cloud through ground stations).
The fuel monitoring system is based on an instantaneous correlation of the efficiency to a lookup table mapping the efficiency to the engine RPM and gear ratio. The efficiency is calculated as a linear function of the lambda sensor reading and correlated to the efficiency lookup table.
The driver behaviour monitoring system is based on a neural network that classifies driving behaviours into – Normal, Inefficient and Unsafe. The Master captures data from a 6DoF Inertial-Measurement-Unit that is fed into the model.
For each slave, a different sensing mechanism is used. The emissions from the truck are passed through a tank of Urea water where the slave module monitors ammonia. Rotary encoder slaves track steering integrity and raise alerts if truck does not move straight in idle position. Another slave uses an LVDT module to track the linear displacement of the ends of the rear axle that breaks on overloading.
Video
Like this entry?
-
About the Entrant
- Name:Moinak Ghosh
- Type of entry:individual
- Software used for this entry:Arduino, FEKO, Google Cloud, Edge Impulse Studio, Segger Embedded Studio, Simplicity Studio, Matlab
- Patent status:none