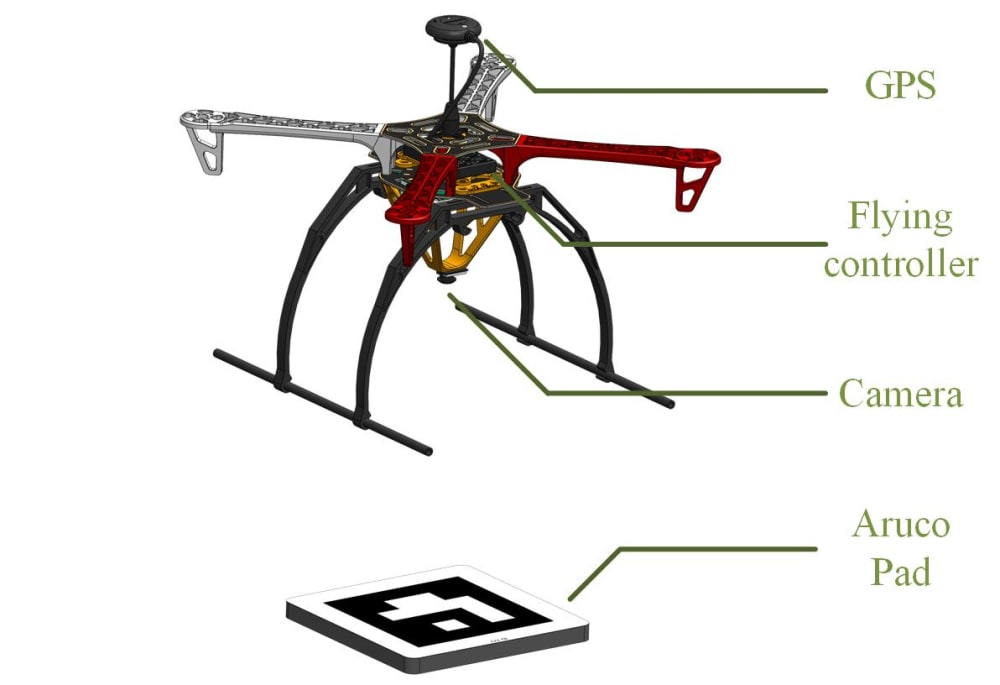

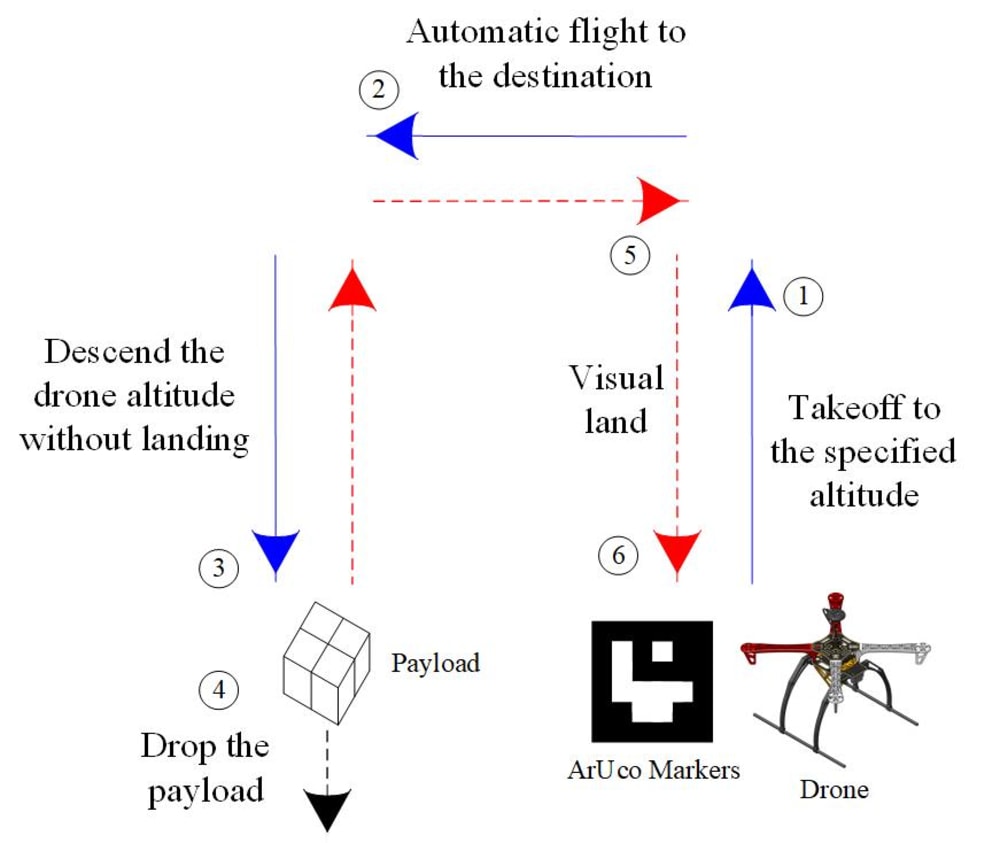
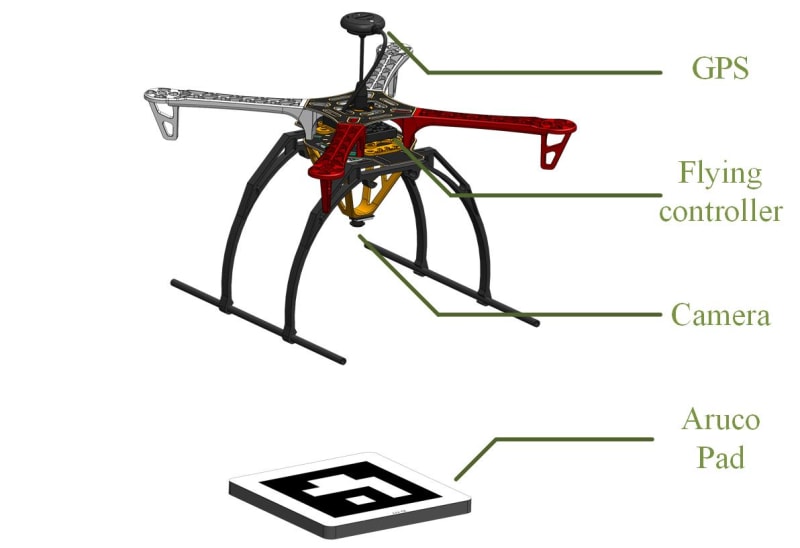

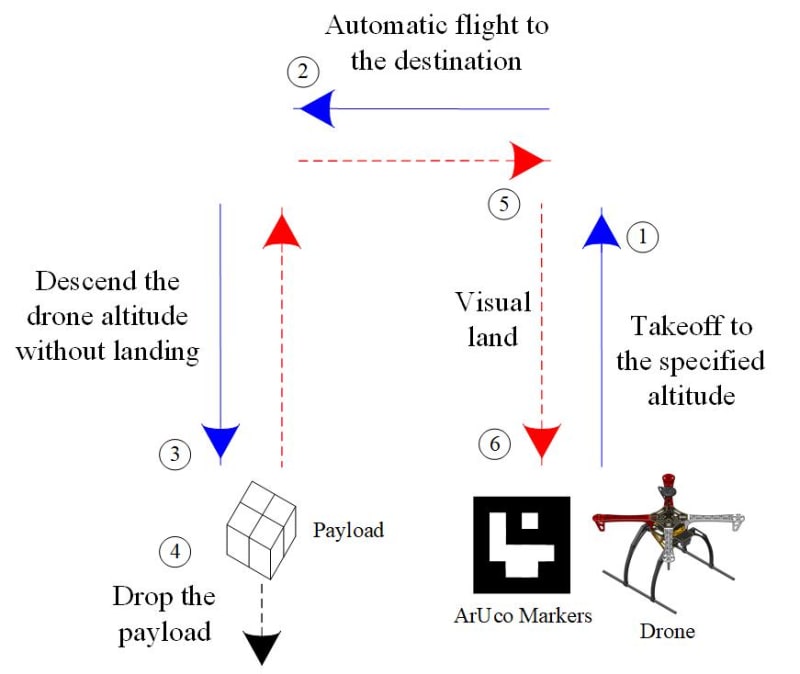
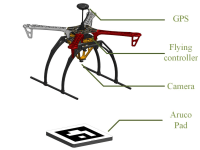

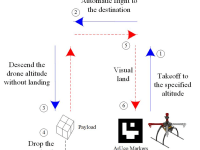

Reducing cost is one of the important issues for every drone logistics companies. However, most drone logistics systems on the market are too costly to become widely used. Also, whether the drone can take off and land accurately is one of the issues to make drone logistics become widely used. Therefore, we propose a logistics system that only uses a drone, fly controller, camera and aruco pad. Our system combine with Global Navigation Satellite System to perform flight path planning and navigation. And it's supplemented by an onboard camera to visual identity ArUco Markers which are placed at the landing site. At the same time, it cooperate with OpenCV open source camera pose estimation library “aruco” to exchange the read coordinates to longitude and latitude. Finally, an onboard computer will use Dronekit to control the drone to take off and land accurately.
To prove the feasibility of this work, we built a realistic drone model and system to test. The results show that this system can indeed take off and land accurately.
Video
-
Awards
-
 2022 Top 100 Entries
2022 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Hsuan Hsin Wu
- Type of entry:teamTeam members:Hsuan Hsin Wu, Yu Ying Lin
- Software used for this entry:Mission Planer, SOLIDWORKS
- Patent status:none