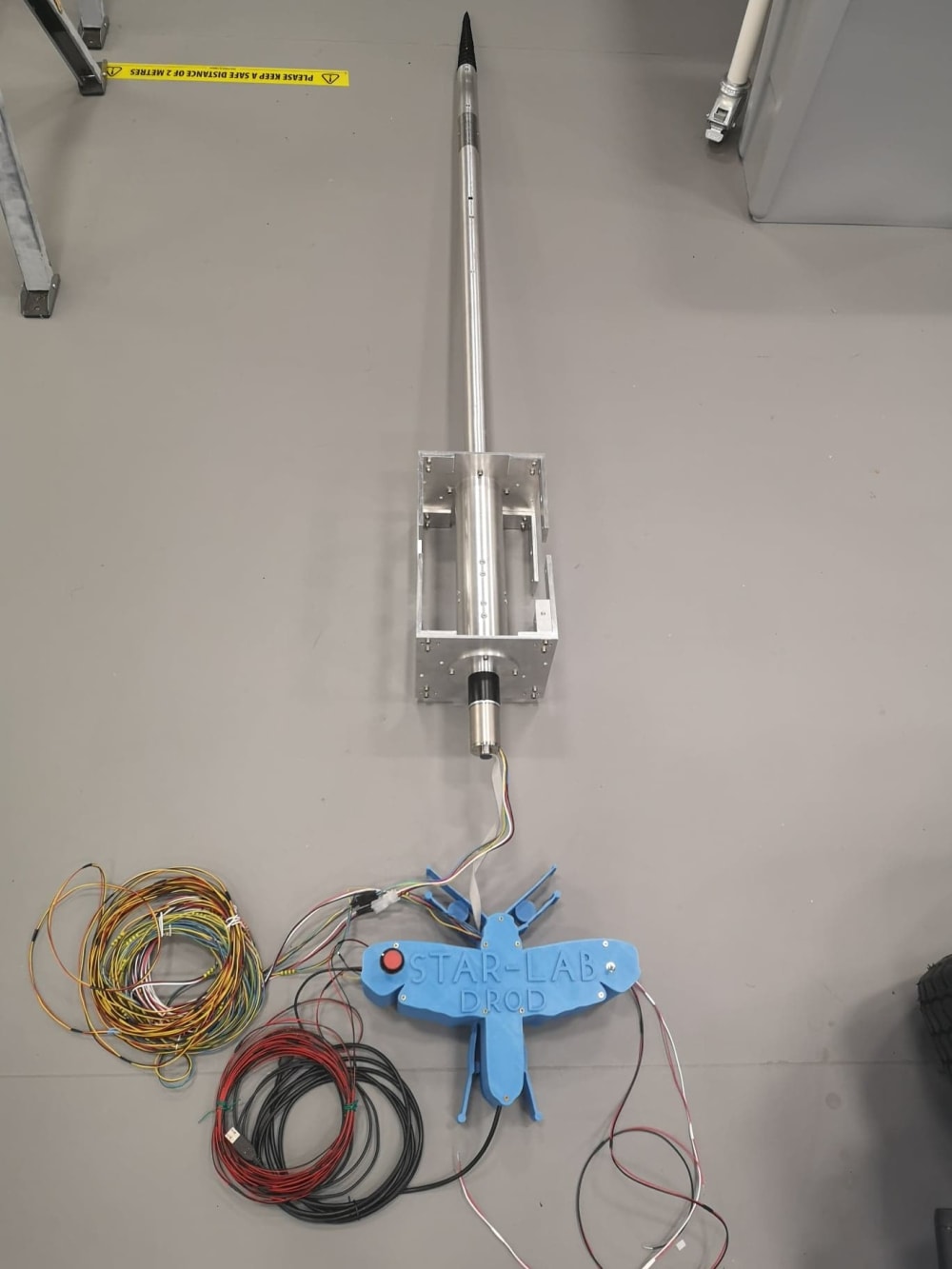

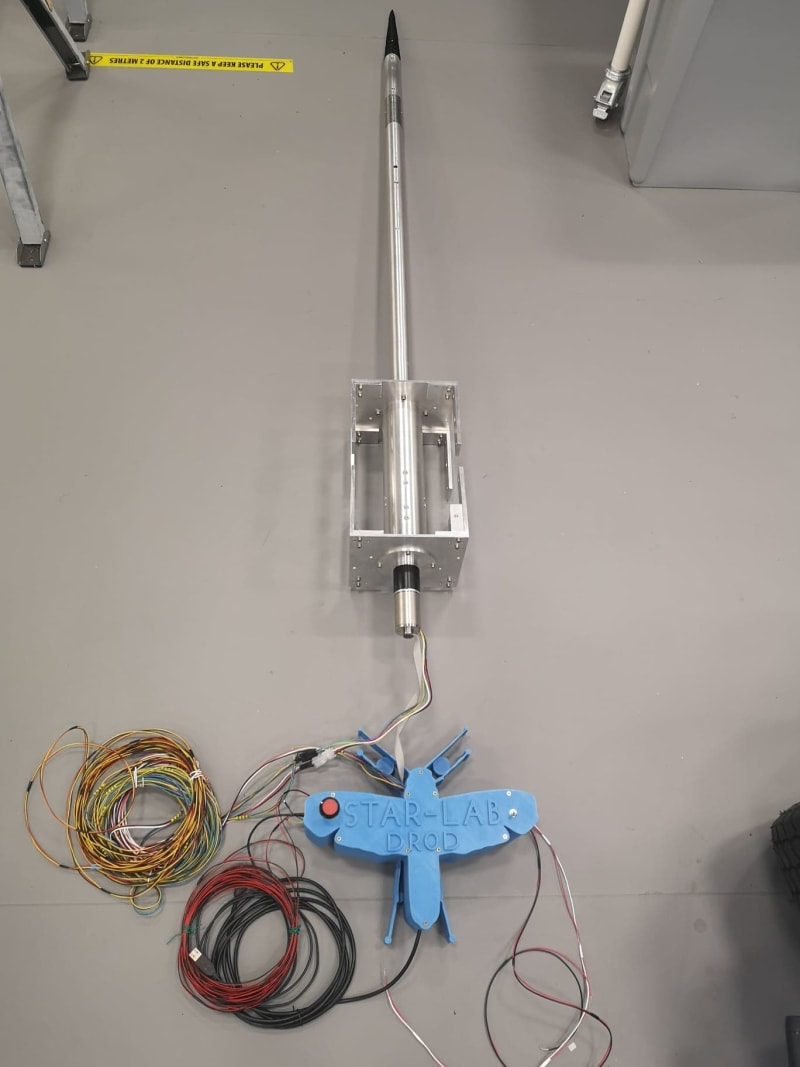






This entry presents a novel hybrid biologically-inspired dual-reciprocating and oscillation drill and sampler. The proposed system combines both reciprocation motion bioinspired by the wood wasp ovipositor and a new undulatory/oscillation motion bioinspired by the caudal fins of marine creatures, (which use this motion to generate a thrust force to propel themselves through water), as well as the sandfish lizard that uses an undulatory body motion to bury itself and hide in the sand. It is proposed here that including this motion will significantly enhance the performance of the dual reciprocating drill, resulting in the design of the novel dual reciprocation oscillation drill (DROD).
The development of the DORD system is targeting full integration with rovers for creating more opportunities for low-cost subterranean planetary bodies exploration. Several improvements have also been proposed to improve its suitability for a space exploration mission, such as a compact size, a large (~25 cc) automated sampling compartment, potential stem flexibility, and customized drill bits for fitting the various regolith physical properties on planetary bodies.
This novel design will cut the space exploration mission cost to approximately 1/10 due to the outstanding features captured from the creatures (i.e, wood wasp and sandfish lizard). These features are summarized as:
- Light weight drill and sampler with a total weight of only 7 kg (could be reduced significantly in future prototypes).
- Energy efficient (consumption of energy is less than 50 watts), which is very convenient for space exploration for having prolonged exploration time.
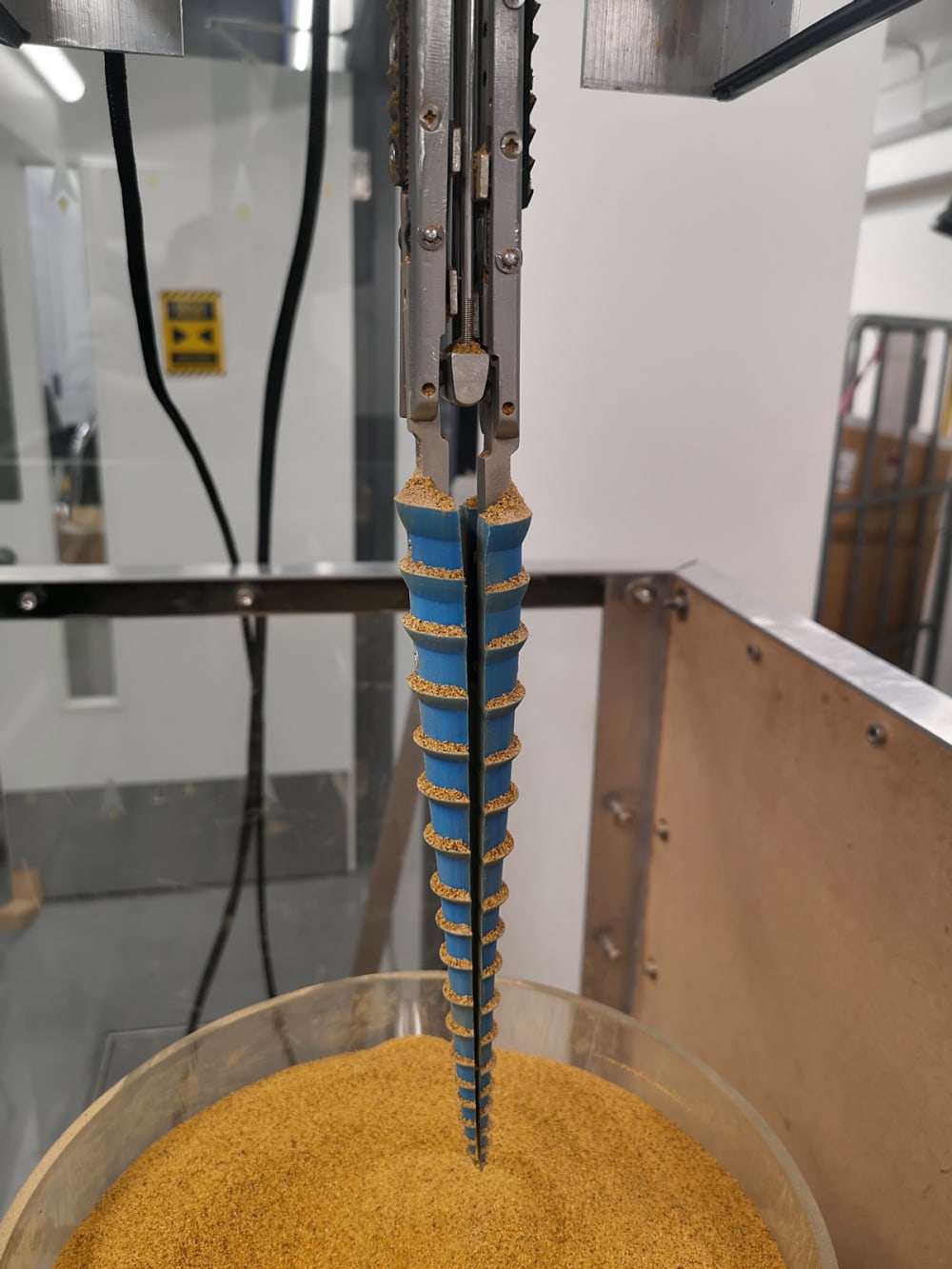
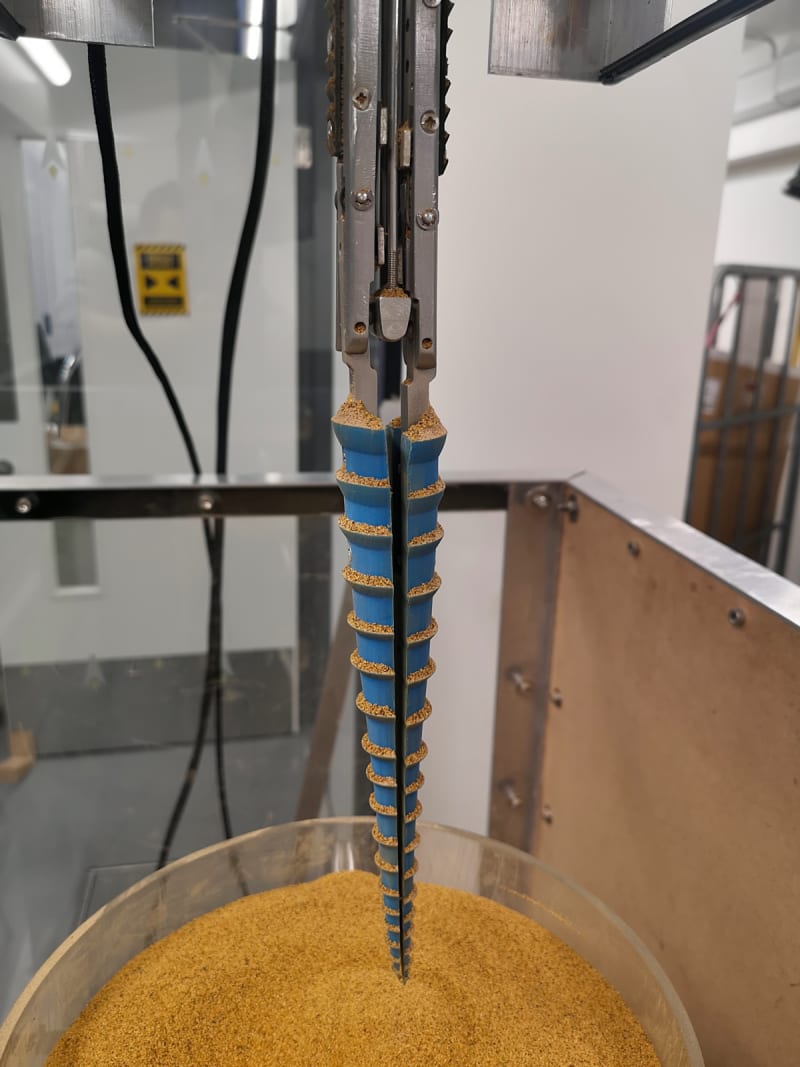
- The penetration rate is comparatively high (20 mm/s) which will enable the rover to explore different locations quickly. The time elapsed to drill 820mm depth was only 2 minutes into the ES-3 Martian regolith simulant.
- Acquiring a sufficient sample amount (20 g) with the current prototype. This is planned to be extended by increasing the sample compartment over the entire length of the drill stem halves.
- It has the capability of acquiring samples from multiple depths and is equipped with humidity and temperature sensors in the sample compartment for performing in-situ inspection of the planetary soil for seeking any biomarkers before its chemical and physical properties get altered.
The feasibility of the DROD has been proven by the kinematics and dynamics simulations produced by MATLAB and ADAMS. Finally, the effectiveness of different drilling motions was studied numerically using discrete element modeling and multi-body dynamic (EDEM-ADAMS) co-simulations. This revealed the underlying mechanisms of the drill–soil interactions. Finally, DROD has been tested for performing the tasks of penetration into the simulated soil, acquiring samples, and retrieving back. It is intended to be integrated with the exploration rovers in the future which will save much precious time wasted before on the planets and save cost for the limited exploration spaceships.
Publications:
- DROD: A hybrid biomimetic undulatory and reciprocatory drill: Quantitative analysis and numerical study
https://doi.org/10.1016/j.actaastro.2021.02.007 - Development of the third generation of the dual-reciprocating drill
https://doi.org/10.3390/biomimetics5030038 - Customizable and Optimized Drill Bits Bio-inspired from Wood–Wasp Ovipositor Morphology for Extraterrestrial Surfaces
DOI: 10.1109/AIM.2019.8868816
Video
-
Awards
-
 2022 Aerospace & Defense Honorable Mention
2022 Aerospace & Defense Honorable Mention -
 2022 Top 100 Entries
2022 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Mohamed Alkalla
- Type of entry:individual
- Software used for this entry:SolidEdge, MSc ADAMS, EDEM,
- Patent status:pending