
Our goal is to reduce RSI and to automate tasks in industries that haven’t used robotic arms yet due to high costs. We accomplish this by using gravity compensated robotic arms, allowing us to reduce motor cost, use simpler power electronics and control, and by designing backdriveable and inherently safe robotic arms.
Gravity compensation is currently utilized in prosthetics and surgical tools. Its use in robotic arms would enable lower cost motors and simpler algorithms to be utilized. The inherent backdriveability and safe behavior makes it suitable for collaborative work with humans. Brushless gimbal motors are like normal brushless motors but wound for very low speed (with lots of turns of thin wire) and many do indeed have more 2poles. They are best used in situations where their velocity is close to zero, but their torque is high and able to change rapidly, giving high precision in position control.
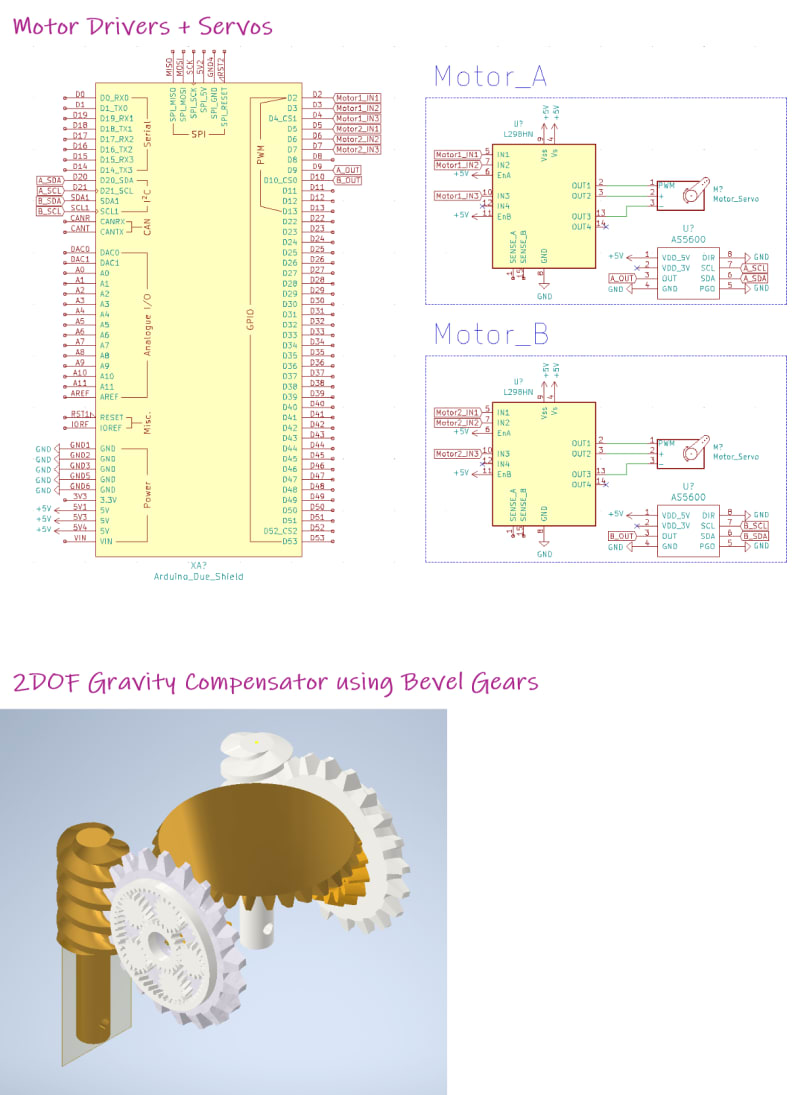
By shifting the gravity load from the motors to the springs, we can shift from using heavy-duty motors to the light and fast gimbal motors. In addittion to the reduced cost from smaller and cheaper components, the energy expenditure is reduced from only having to move the inertial load.
Gravity-compensated robotic arms could be used in:
- electronics manufacturing to replace humans in the placement of parts
that cannot be loaded on reels. - assembly of palletized goods and packaging
- movement of heavy loads without needing to segregate human and
robot workplaces.
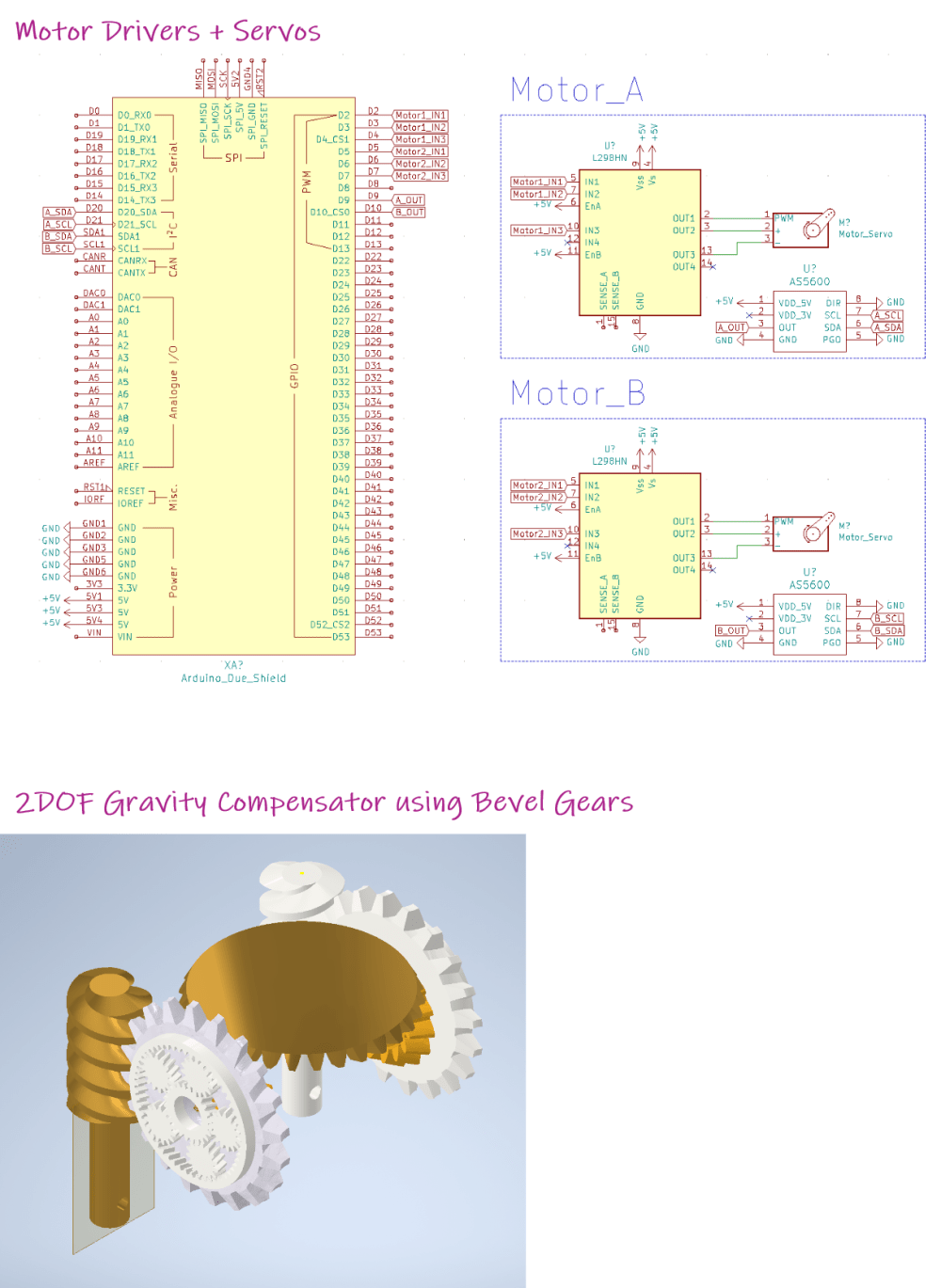
We are currently building a prototype and we’ve been making fast progress, thanks to the use of 3D printing, open source motor control, and drone motors
-
Awards
-
 2021 Top 100 Entries
2021 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Vishakh Pradeep Kumar
- Type of entry:teamTeam members:Alia Khan
Eman Rashid Ali
Danish Sheikh
Vishakh Kumar - Software used for this entry:Autodesk Inventor, KiCAD, Arduino IDE,
- Patent status:none