
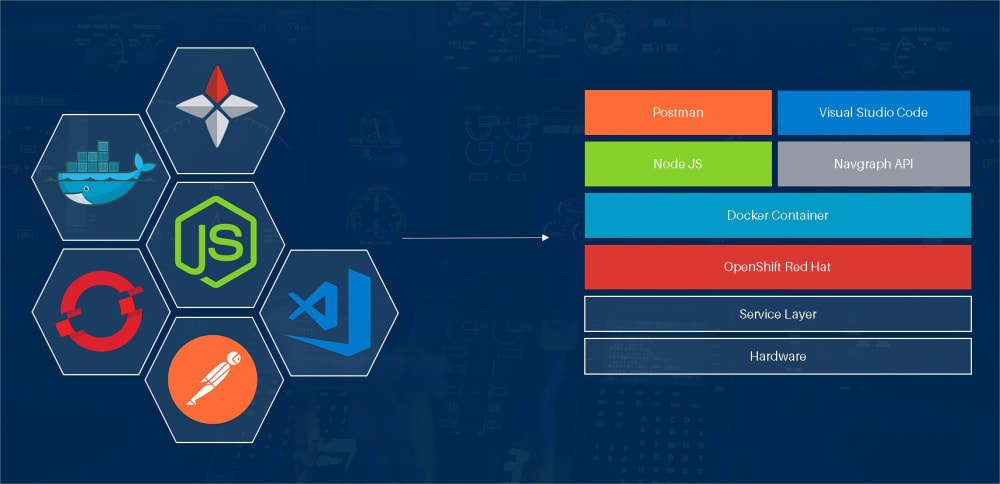

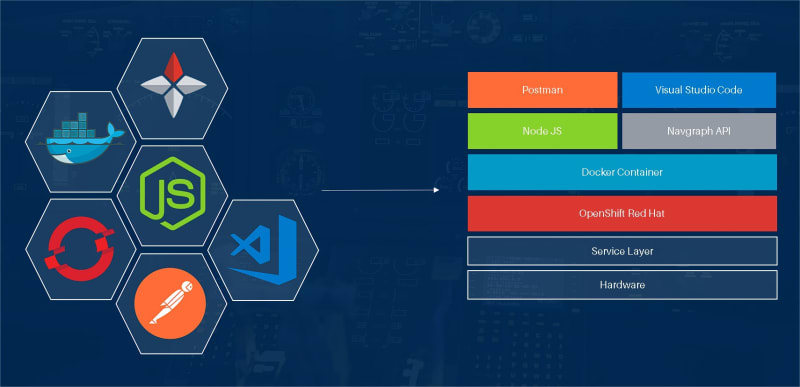


The main objective is to develop a FMS lateral navigation system 's prototype using webapps technologies. The application layer responsible for the LNAV logic and all communication interface has in its scope the use of microservices allied to the JavaScript programming language with the ES6 standard in its standalone execution environment, NodeJS. It'll be running in containers with minimal orchestration for future features. This project has the potential to be reusable in other vehicles, such as cars, drones, eVTOLs and boats.
Like this entry?
-
About the Entrant
- Name:Mateus E R Da Costa
- Type of entry:individual
- Patent status:none