







This concept provides a method whereby identical dual radial gap motor modules can be joined together in a linear assembly for the purpose of incrementally increasing or decreasing the total power output available to perform a particular task.
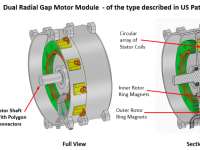
The preferred motor type employed as an individual module is a dual radial gap motor as described in US patent # 9124144. This describes a synchronous PMDC motor having two radial air gaps resulting in a machine that is functionally both an inside and outside rotor motor. The rotor has two spaced apart iron annular rings attached to a common central shaft. An array of permanent magnets is affixed to the opposing surfaces of the inner and outer rings. A stator, composed of a circular array of induction coil modules, is encapsulated between the two rotor rings. The stator coils are centrally positioned within the rings so that there are equal air gaps between the coil lamination ends and the magnets. The stator is fixed between the annular rings so that the rotor rotates around it on the same axis. This unique architecture provides motor with two separate radial torque components. They act in tandem to produce up to two times more torque (and therefore power) than a conventionally designed motor.
Typically, when employing more than one motor, each motor requires a separate motor controller and encoder. With the proposed method, the individual motors are linearly stacked end-to-end and coupled together so that the individual motor rotors maintain collectively the same radial magnetic orientation
The design of the coupling is key. It must maintain the synchronized angular orientation of each motor and be capable of transmitting the total torsional load of the entire system. It must also be capable of accommodating a blind engagement as the modules are attached together. The preferred method of coupling is to use a polygon attachment system. Polygon couplings are both self-centering and provide far superior torque transmission capability
The rotor shaft has a male multi-lobe polygon configuration at the upper end and a matching multi-lobe female cavity at the rear. This allows the motors to be operationally attached once coupled together. Since the motors are identical and the magnet orientation with respect to the lobe orientation on the shaft is the same, electrical synchronization is maintained between all motors
The cluster will employ a compliment of multi-phased motors. Each of the motor phases will have an individual electrical point of contact for each phase as well as optionally one for a common ground. The individual motor phase output terminals are linked in parallel to a single controller contained, along with an encoder, in a housing at the front end. Regardless of how many motors are linked, the entire multiple motor assembly can be operated using only one controller and one encoder.
The total power output is incrementally increased or decreased by adding or subtracting individual motor modules. This provides output flexibility and reducing system complexity by having only one standard motor design used as a module.
Like this entry?
-
About the Entrant
- Name:Bryan Prucher
- Type of entry:individual
- Software used for this entry:SpaceClaim 3D Modeling Software
- Patent status:pending