
The easy to fly Fying Segway is a personal electric octa-copter with computer assisted stabilization. It has many uses. It can be flown manually or pre-programmed to fly autonomously navigating by GPS guidance. It can autonomously fly to any location and then be used to return rescue injured flyers & soldiers behind enemy lines, lost hikers, climbers. and flood victims.
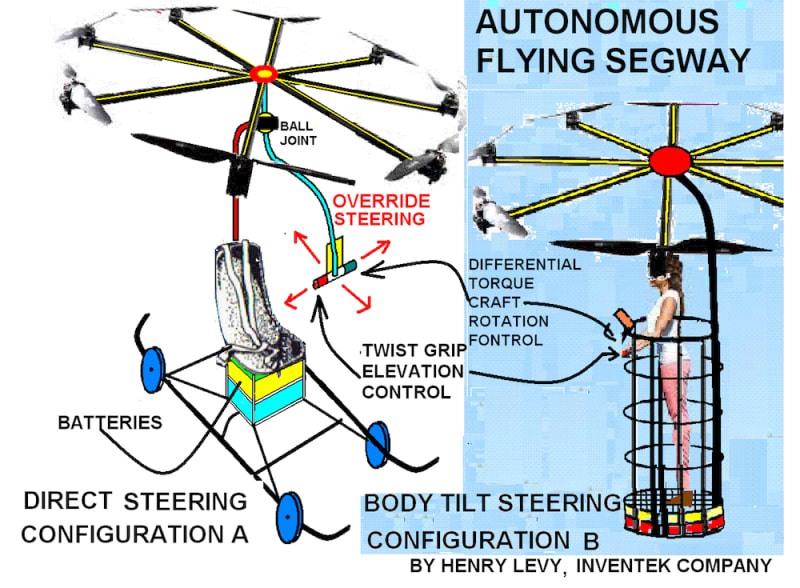
It can go around town, fly across hills, valleys, streams. lakes, and even jump mountains. It can be an observation platform, weapon platform, supply delivery system, personal transportation vehicle, and handicapped mobility system. Two of several configurations, (A) Handlebar Control and (B) Body Tilt Control are illustrated.
In configuration (A), a man sits in a swinging chair hanging from a ball joint above his head attached to a pipe extending from a handlebar controller (with tablet computer) to an eight motorized propeller lifting array above him. The handebar and the propeller array are rigidly attached by the pipe through the ball joint.
The flyer steers in two ways: First, pushing the handlebar controller forward, back, left, or right, steers the craft.and secondly rotatung the left twist grip handlebar control controls the relative speed of all of the normal and reverse image clockwise and counter-clockwise spinning propellers. This controls differential torque of oppositely spinning motors and propellers applied to the whole craft enabling him to rotate about his vertical axis.
Rotating the right twist-grip variable-rotary-selector-switch controls up, down, and hover propeller speeds.
Two sets of lithium-ion batteries are below the chair with power wires connected through the structure up to the handlebar controls and to the multi-propeller motors. Each battery controls half the motors with sufficient power to automatically land the craft if the other motors fail. Battery capacity alerts sound loudly.
Computer assisted stabilization is comprised of inertial accelerometers and gyroscopic sensors inputing their information into the computer control.
Moving the handlebars forward, moves the craft backward, and moving it backwards moves the craft forward overriding computer control because it tilts the propeller array with the computer sensing the weight distribuion change via accelerometers & gyroscopic inputs assisting in propeller speed control.
In configuration (B), a woman stands on a carbon fiber grating enclosed by carbon fiber rails suspended from, and rigidly affixed to, a multi-propeller lifting aray, while she holds onto a hadlebar controller (with tablet display). She steers in two ways: first by leaning left, right, forward. or back; and secondly by rotatung the left twist grip handlebar control as in Configuration (A). Leaning forward, backward, left, or right controls movement forward, backward, left, and right. Rotating the right twist-grip variable-rotary- selector-switch controls up, down and hover propeller spoeds. Two sets of lithium-ion batterues are below the grating stand with power wires distributing power through the structure. Leaning one's weight destabilizes the craft enough to lean the propeller array in the direction you wish to go with the computer sensing the weight distribution change via accelerometer & gyroscopic inputs and assisting in propeller speed control.
Like this entry?
-
About the Entrant
- Name:Henry Levy
- Type of entry:individual
- Software used for this entry:MS PAINT
- Patent status:none