

The Idea
The X is a miniature launcher that can be used to propel metallic shells at a pre-determined target. It acts as a lilliputian simulator of a ballistic launcher. The robot perceives the target and adjusts the launching arm accordingly using various projectile motion formulae. Eventually, a tiny metallic bullet shall be launched onto the target.
The Building Blocks
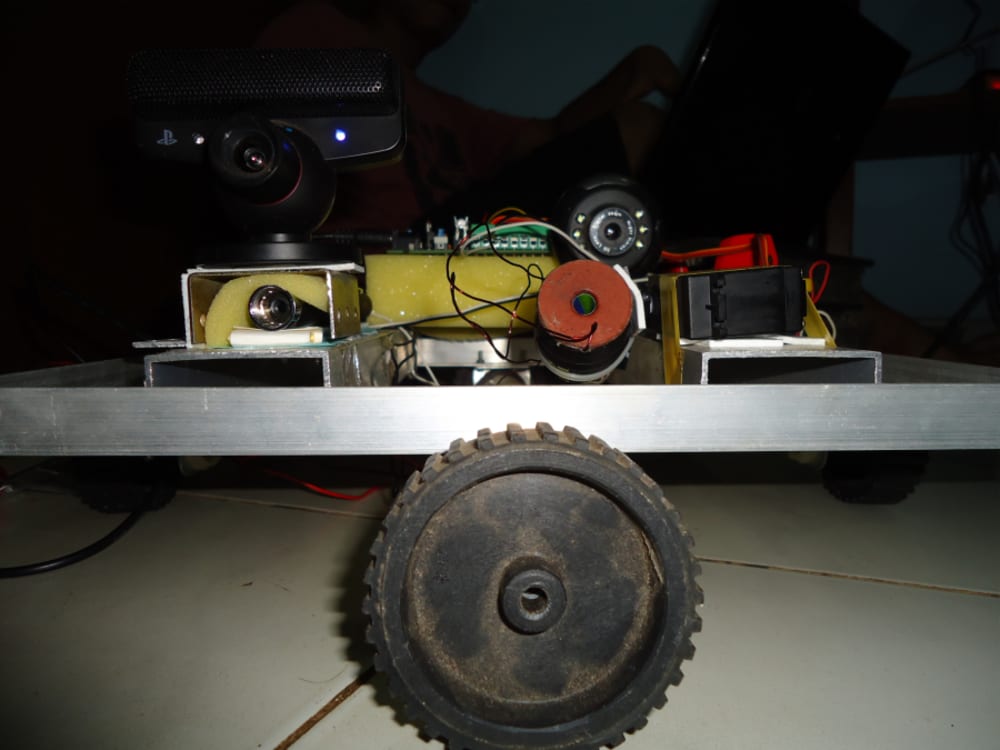
1. The Aluminum Chassis
The Aluminum Chassis serves as the base to the bot.
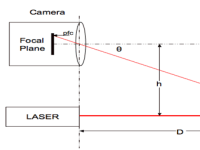
The Laser-Eye Sensor System
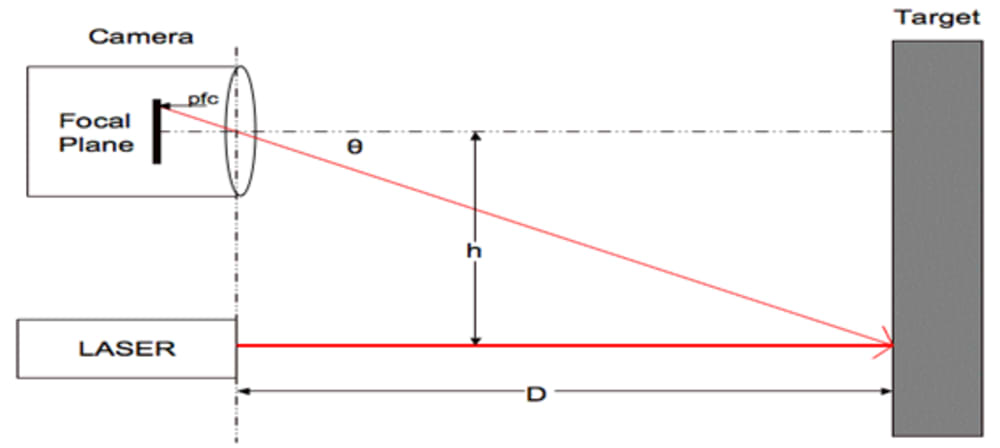
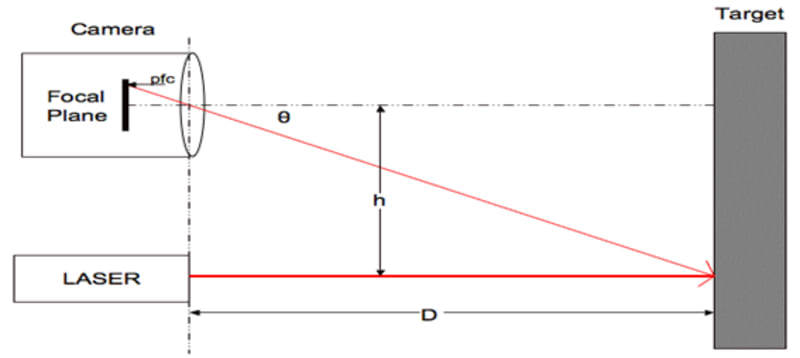
The Laser-Eye Sensor system works as the eyes of the project. A 50 mW laser pointer is directed on a flat screen placed in the field of vision of the camera. The camera captures the image and sends it to the processing unit.
2. The Processing Unit
The Processing Unit functions as the brain of the bot. The processed image is then accessed by MATLAB which then finds out the position of the brightest pixel in the image
This calculated value is then fed to another program RangeFinder, which calculates the angle of projection using the formula ? = 0.5sin-1 (g x R/v0)
Where:
v0 = Velocity of projection
g = Acceleration due to gravity
R = Distance of the target from launching arm
Eventually, this value is fed to the motor attached to the launching arm and it rotates through the specified angle.
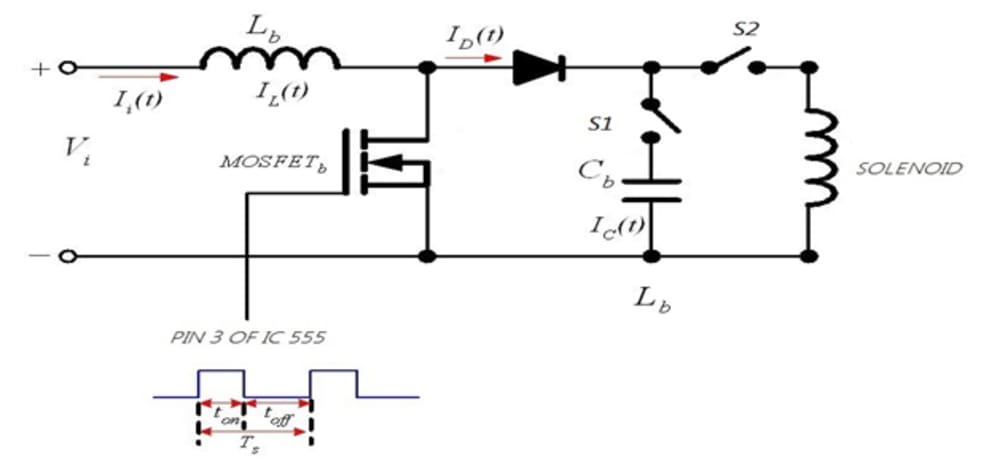
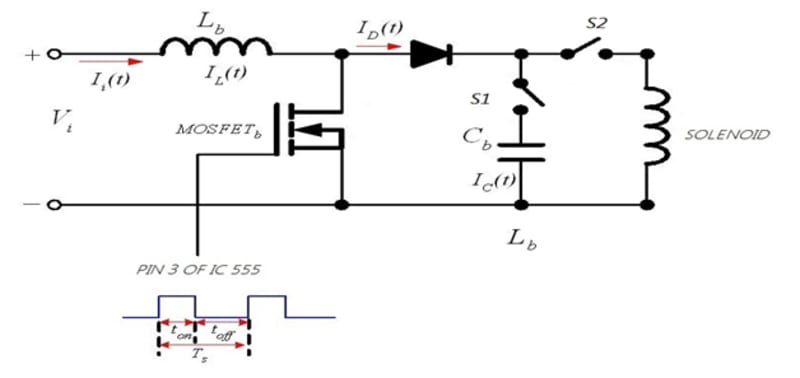
1. The Charger Assembly
The Charger Assembly consists of the following components – A rechargeable DC battery, IC 555 (in astable mode), an n-channel MOSFET, diode, inductor, two capacitors connected in parallel and a solenoid. The square wave output is fed to the power MOSFET. As a result, forcing it to switch between on and off states. A very high back emf is generated to counterbalance the discharging current into the capacitor. As a result the capacitors are charged to very high voltages in am matter of 15-20 seconds.
The Execution
The Laser and Eye-Cam sensor system senses the target and sends an image to the processing unit. The processed image is then accessed by MATLAB which then finds out the position of the brightest pixel in the image. Using the parallax method, the distance of the target from the robot is calculated to decode the projection angle
1. The Electrogun Launcher
Once the capacitors have been charged to a fixed voltage, they are discharged and the projectile is propelled towards the target The Electrogun Launcher consists of a cylindrical solenoid powered by a capacitor bank charged to a high voltage. A soft ferrite core acts as the projectile, which is placed in the cavity of the solenoid, at some distance away from the solenoid. The high voltage discharge from the capacitor bank provides the force to shoot the projectile.
Applications
• Effective as a line of sight attack device on military defense systems like tanks, Javelins, etc
Video
Like this entry?
-
About the Entrant
- Name:Sushant Patkar
- Type of entry:teamTeam members:Prathamesh Patil
Tilak Vaidya
Sushant Patkar - Software used for this entry:MATLAB
- Patent status:none