









Practical manned Vertical Take-Off and Landing aircraft have yet to develop from multi-rotor technology. Although small-scale multirotor vehicles are now common, they do not scale well to viable manned systems and lack endurance for hover and cruise. Current multi-rotor vehicles generally use direct-drive differential rotor stabilization. They “cruise” by negatively pitching the entire vehicle, unlike a helicopter which pitches just the rotor head for forward thrust. A new class of vehicles (Type A) has been developed which utilize multi-rotors, but cruise on wings. A separate proprietary winged Type B uses multi-rotors, a high L/D gyroscopic wing-disk and outboard fans for forward thrust but without negative pitch. Within Type A class, two vehicles have been developed, a multi-rotor with wings which counters negative pitch to cruise and another with fixed wings which trim in cruise flight. The key aspect of the innovation is that this vehicle class has high L/D (8-15) AND it utilizes a Heinen-VTOL high thrust to weight and power rotor system (8-12 lbf/lb and 14-18 lbf/hp ). For comparison, General Aviation propeller aircraft barely achieve 6-7 lbf/hp, static.
Competing multirotors are unwinged and have low thrust to weight and power (6 lbf/lb and 6-8 lbf/hp. One of the Type A designs cruises high speed (> 300 ktas) and can achieve normal-to-travel rotors. The high thrust-to-weight and power is achieved by using a design space of rotor size, shape, stiffness, gear ratio, rotor speed and pitch control that optimizes cruise and hover efficiency. Helicopters with very large rotors twist, warp, flap and bend which limits hover and cruise envelope. Another limitation of helicopters is lack of wings. These limitations are overcome in Type A and B vehicles, and the rotor scale-up issue is solved. The vehicle attitude control system is a high-speed high-loading blade pitch control mechanism. There is only blade variable pitch, no complicated cyclic found in helicopters. Under full load, Heinen-VTOL propulsion has > 10 Hz bandwidth, which is sufficient to allow scaling up of multi-rotors to manned vehicle size.
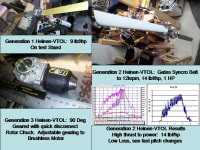
The Type A vehicle in Figure 1 was developed in 2011, using traditional quad technology to prove out the design, but suitable for larger but more efficient Heinen-VTOL rotors. Figure 1 shows a winged multi-rotor which rotates the wings as the vehicle pitches negative for forward flight. The vehicle can fully rotate to fly the wings over/under in cruise with rotor plane vertical. The vehicle in Figure 2 shows a closed wing around a quad which the Heinen-VTOL rotors. Figure 1 vehicle was prototyped with traditional multi-rotor propulsion while the larger variable pitch systems were developed (Figure 3). Figure 3 shows Heinen-VTOL rotors and performance. Vehicle 1 was followed by 2 years of Heinen-VTOL propulsion development, also on the newer Vehicle 2.
Vehicle 1 Specs: 1 HP 12” rotors, 7 lbf hover (14 lbf Heinen-VTOL), wingspan 72”
Vehicle 2 Specs: 1 HP 37” rotors, 10’Wx14’L
Video
-
Awards
-
 2014 Aerospace & Defense Honorable Mention
2014 Aerospace & Defense Honorable Mention -
 2014 Top 100 Entries
2014 Top 100 Entries
Like this entry?
-
About the Entrant
- Name:Gregory Heinen
- Type of entry:individual
- Software used for this entry:Matlab/Simulink, COMSOL modules, Personal analysis software, Excel
- Patent status:pending