





Call it the Swirl Drive. The purpose of the idea is to improve on the Mecanum-type drive system by increasing traction and stability (and utilizing more off-the-shelf components), while retaining its simplicity, maneuverability and control system.
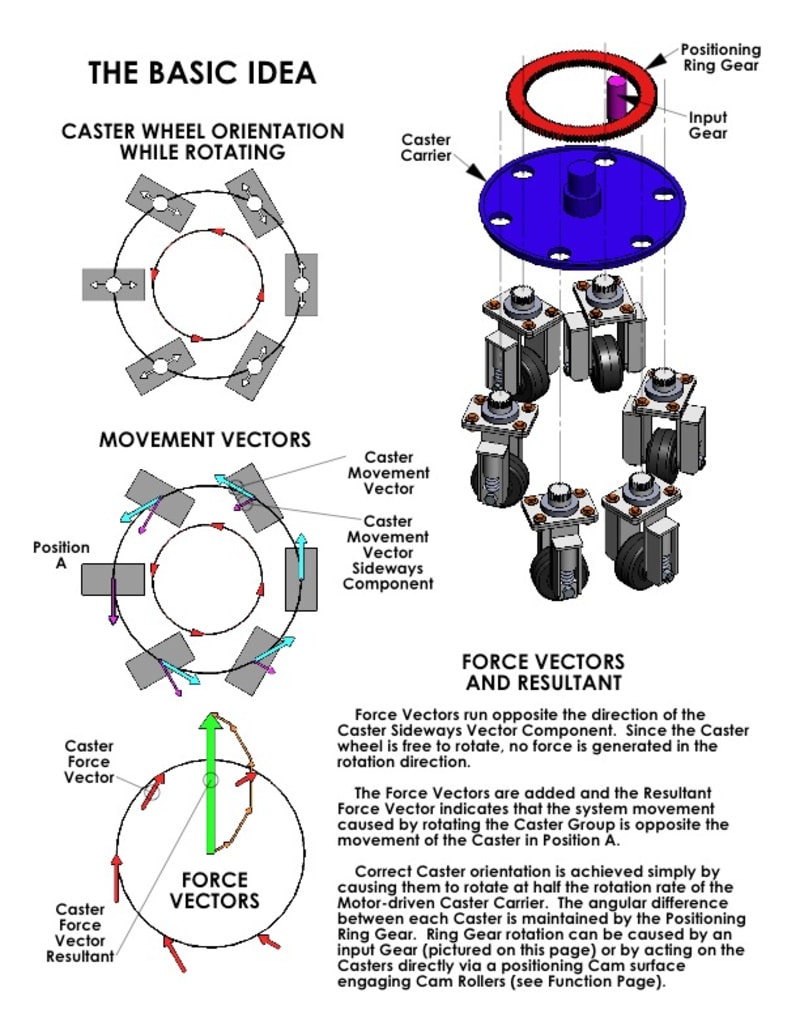
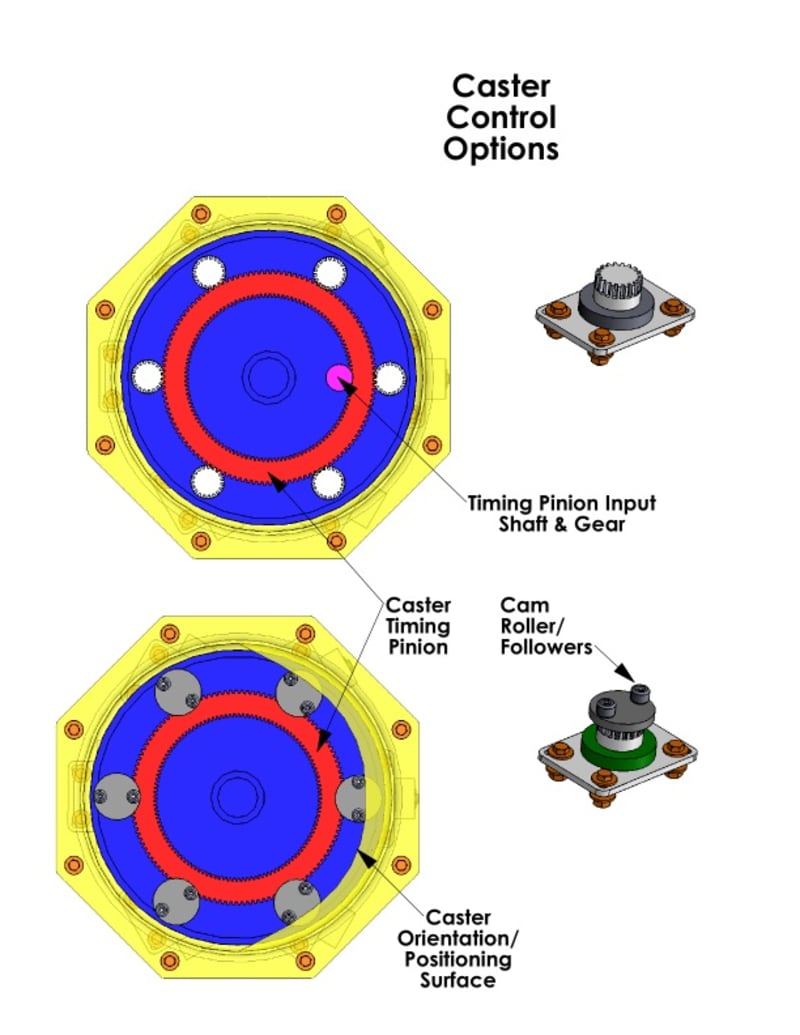
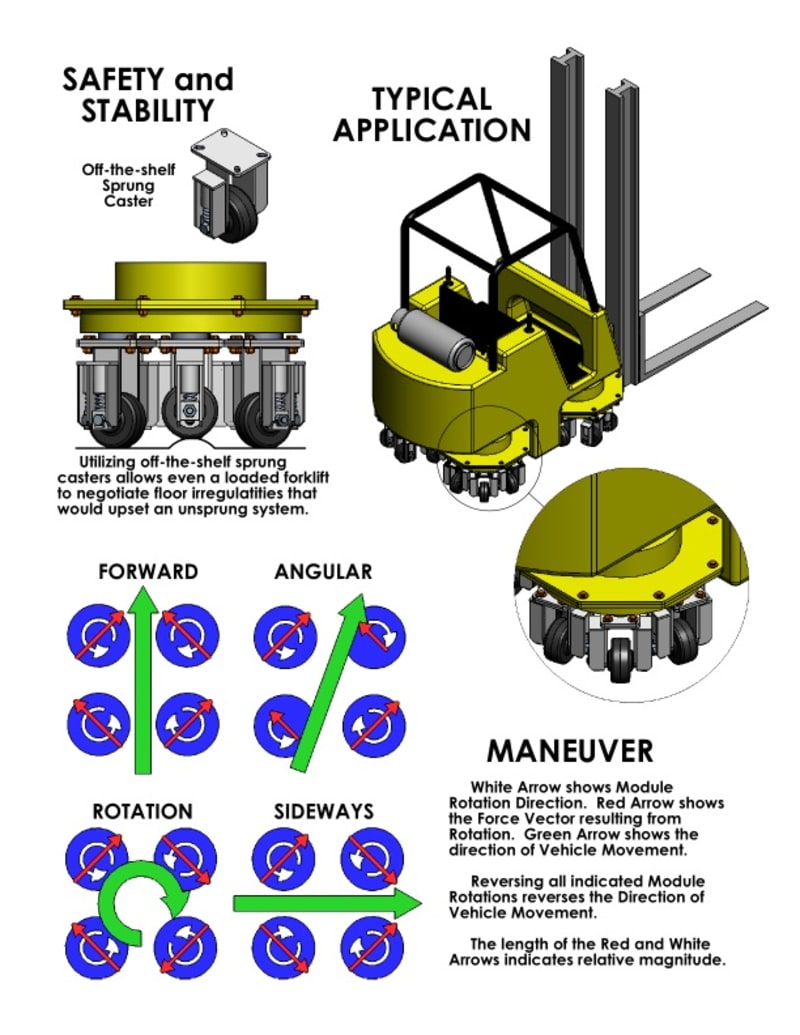
How the idea works: Start with a motor-driven turntable rotating parallel with the floor. Casters are evenly spaced about its perimeter. A “cycle” begins with a caster in the “non-driving” position (where the caster wheel is parallel with the movement caused by the turntable). As the turntable rotates, the caster turns (or is steered) so that, by the time it is opposite the “non-driving” position, it has been turned 90°. While the turntable completes a revolution, the caster also continues turning until it is again parallel with the movement direction of the turntable. During one turntable rotation, the caster will turn through 180° or exactly half the rotation rate of the turntable. Since the caster wheel is free to rotate, the caster only applies force to the floor when it is moved “sideways.” As each caster is carried through an entire rotation, it generates a force vector which varies from zero (at the beginning) to a maximum on the opposite side and then back to zero again. The force vectors from all the casters sum to produce a single resultant force. The Moment produced by all the caster forces is cancelled out by having the drives mounted in pairs, rotating in opposite directions. If at least 4 drives are mounted on a vehicle and oriented at a 45° angle, by varying the direction and speed of the rotation of each unit, the vehicle may be made to move forward (or backward), sideways, rotate (like a tank neutral steering) or any combination of those movements.
How is it an improvement over the Mecanum drive? It is controlled the exact same way as a vehicle with multiple Mecanum wheels. Since all caster wheels are continuously in contact with the floor, “contact patch” is increased (each M-drive only has one roller in contact at a time except when it, very briefly, has two), increasing available traction. Using sprung casters, floor irregularities will not upset the vehicle and, since a large number of casters are likely to be used, the weight on such an irregularity by any one caster wheel will be much less than that applied by a regular wheel or Mecanum roller. It would possible to build a forklift that, even when loaded, would be able to drive over someone’s foot without injuring the individual. Off-the-shelf casters would be used, reducing the cost of development and of replacing elements that will become worn or damaged.
Typical application(s) for such a system would be forklift trucks, industrial robots or any vehicle where traction, maneuverability and stability were paramount and speed was less important.
Like this entry?
-
About the Entrant
- Name:Brent Cottingham
- Type of entry:individual
- Software used for this entry:Solidworks
- Patent status:none